



















144
DEUTSCH
Menü "Steuerung"
Code Beschreibung Einstell- bereich Werks-einstellung
rr
rr
ll
ll
nn
nn
Nur pos. Sum
Nein - Ja Nein
•Eine Drehrichtungsumkehr kommt nur über den Fahrbefehl zustande, nicht über gesteuerten
Richtung, selbst wenn diese negative Summensollwerte bzw. Ausgangssignale des PI-Reglers.
• Unterdrückung Drehrichtungsumkehr über FWD/REV-Taste des Terminals.
bb
bb
SS
SS
PP
PP
f<LSP=>LSP
f<LSP=>0
Nein
BNS: f<LSP=>0
BLS: f<LSP=>LSP
Nein
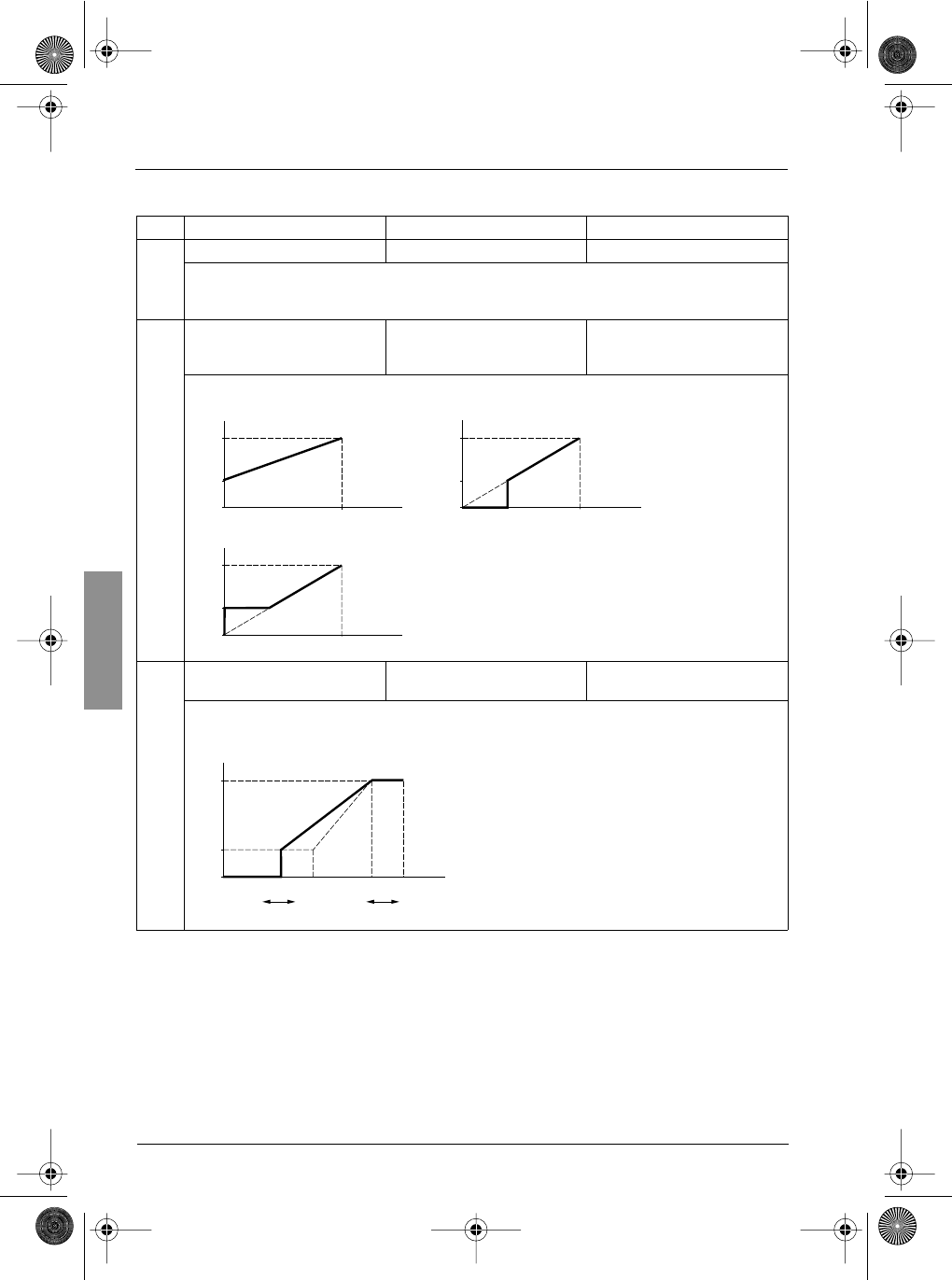
Betriebsart unterhalb der kleinen Frequenz (LSP) :
CC
CC
rr
rr
LL
LL
CC
CC
rr
rr
HH
HH
Min Wert AI2- mA
Max Wert AI2- mA
0 bis 20 mA
4 bis 20 mA
4 mA
20 mA
Minimaler und Maximaler Signalwert auf dem Eingang AI2.
Diese beiden Parameter definieren das Signal auf AI2. Beispiel : 0-20 mA, 4-20 mA, 20-4mA …
Sollwert
Nein
0
LSP
HSP
100 %
F : Motorfrequenz
Sollwert
Sollwertunterdrückung
(BNS)
0
LSP
HSP
100 %
F : Motorfrequenz
Sollwert
Sollwertbegrenzung
(BLS)
0
LSP
HSP
100 %
F : Motorfrequenz
AI 2
(mA)
0
LSP
HSP
CrL CrH 20
Frequenz
GP_ATV58_DE.fm Page 144 Mardi, 2. avril 2002 6:01 18