



















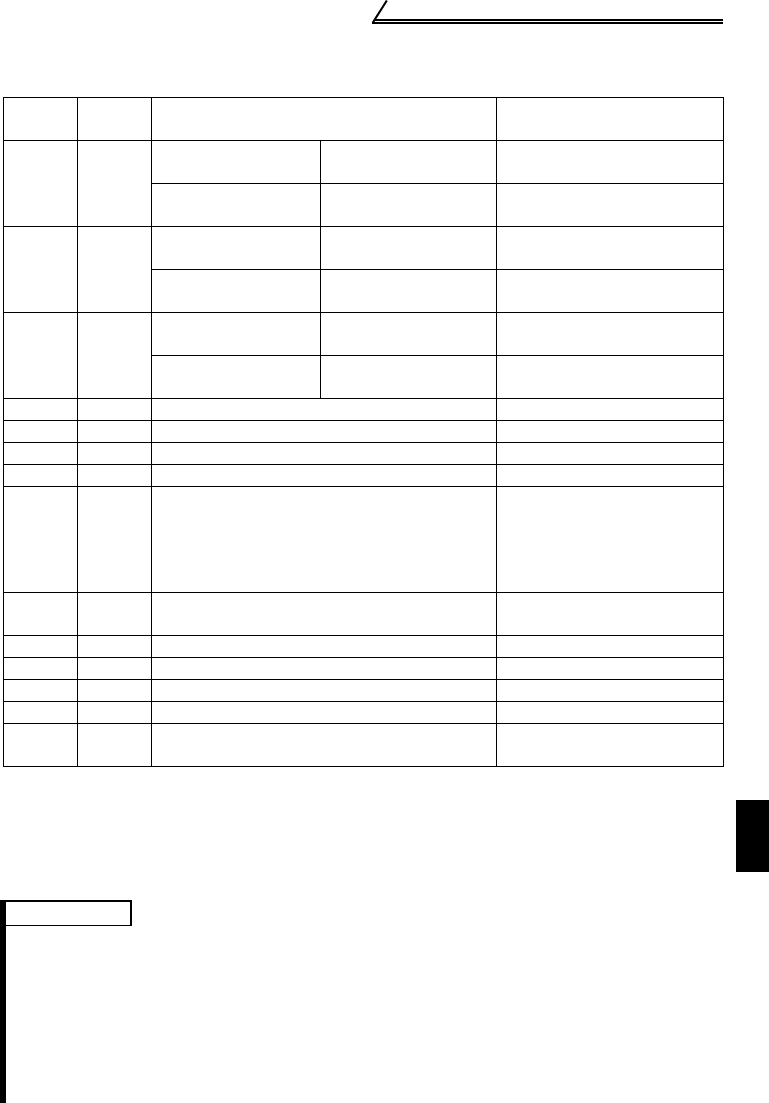
99
Terminal function selection parameters
2
FUNCTIONS
<Setting>
Refer to the following table and set the parameters:
*1.When Pr. 59 = "1 or 2", the functions of the RL, RM and RH signals change as
listed above.
*2.Actuated when the relay contact "opens".
*3.When using the REX signal, an external command cannot be used to make a
reverse rotation start.
Setting
Signal
Name
Functions Related Parameters
0RL
Pr. 59 = "0"
Low-speed operation
command
Pr. 4 to Pr. 6, Pr. 24 to Pr. 27,
Pr. 80 to Pr. 87
Pr. 59 = "1", "2" (*1)
Remote setting
(setting clear)
Pr. 59
1RM
Pr. 59 = "0"
Middle-speed
operation command
Pr. 4 to Pr. 6, Pr. 24 to Pr. 27,
Pr. 80 to Pr. 87
Pr. 59 = "1", "2" (*1)
Remote setting
(deceleration)
Pr. 59
2RH
Pr. 59 = "0"
High-speed operation
command
Pr. 4 to Pr. 6, Pr. 24 to Pr. 27,
Pr. 80 to Pr. 87
Pr. 59 = "1", "2" (*1)
Remote setting
(acceleration)
Pr. 59
3 RT Second function selection Pr. 44 to Pr. 47, H7
4 AU Current input selection
5 STOP Start self-holding selection
6 MRS Output shut-off stop
7OH
External thermal relay input (*2)
The inverter stops when the externally
provided thermal relay for overheat
protection, motor's embedded temperature
relay etc. is actuated.
Refer to page 160.
8REX
15-speed selection (combination with 3
speeds RL, RM, RH) (*3)
Pr. 4 to Pr. 6, Pr. 24 to Pr. 27,
Pr. 80 to Pr. 87
9 JOG Jog operation selection Pr. 15, Pr. 16
10 RES Reset Pr. 75
14 X14 PID control presence/absence selection Pr. 88 to Pr. 94
16 X16 PU-external operation switch-over Pr. 79 (setting: 8)
- - - STR Reverse rotation start
(can be assigned to STR
terminal (Pr. 63) only)
REMARKS
•One function can be assigned to two or more terminals. In this case, the function is activated
when one of the multiple terminals used for assignment turns on.
•The speed command priorities are higher in order of jog, multi-speed setting (RH, RM, RL,
REX) and AU.
•Use common terminals to assign multi-speeds (7 speeds) and remote setting. They cannot
be set individually.
(Common terminals are used since these functions are designed for speed setting and need
not be set at the same time.)