



















6-3
CHAPTER 6 Increasing the robot operating speed
(2) Increasing the speed with the WEIGHT statement
[Also refer to:] Robot controller owner's manual
("Robot parameters" – "Axis tip weight" in Chapter 4)
Programming manual
(WEIGHT statement in "11. Command statements".)
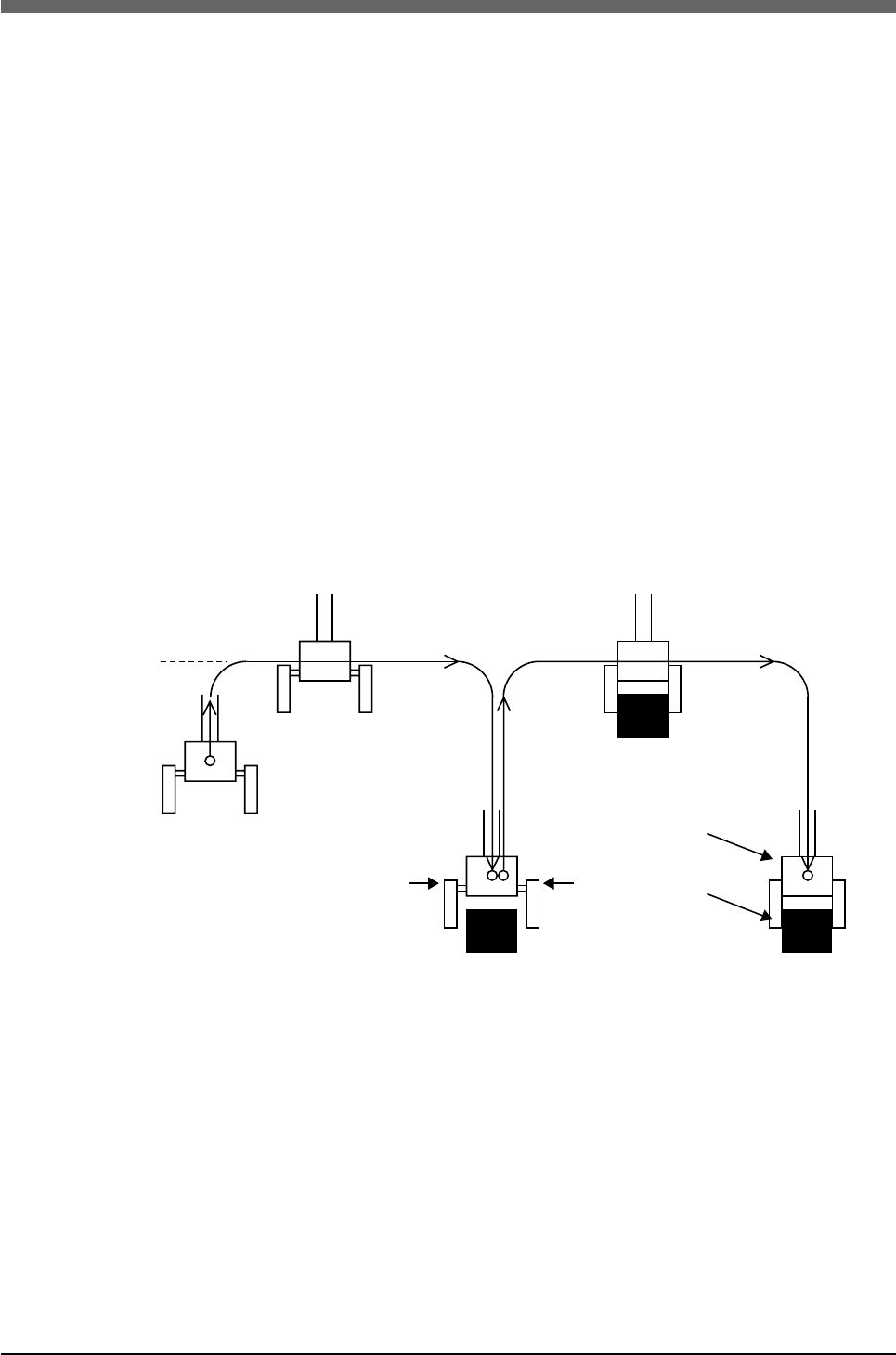
[Example]
From P1 when chuck is open:
WEIGHT 5 ........Changes the axis tip weight parameter to 5kg (no workpiece).
MOVE P, P2, Z=0
DO3 (0) = 1 .......Chuck closes.
WEIGHT 10 ......Changes the axis tip weight parameter to 10kg (with workpiece).
MOVE P, P3, Z=0
In the above program, the acceleration can be set to a higher level by reducing the
axis tip weight parameter to 5kg while the chuck does not grip any workpiece,
and then set to a lower level by changing the axis tip weight parameter to 10kg.
Compared to programs using an axis tip weight parameter left set at 10kg, this
method shortens the cycle time since the acceleration is increased.
P1
Z=0
Chuck opens.
Chuck 5kg
Workpiece 5kg
P3P2
Chuck closes.
No workpiece Chuck is gripping workpiece.