



















4-10
CHAPTER 4 Adjustment
3-2 Machine reference
The YK-X Series position detector uses a resolver having one position that can
perform absolute reset in respect to one motor rotation.
When absolute reset is performed with the sensor method or stroke end method,
the origin position will be set to a position where it can be reset immediately after
the origin sensor reacts to the dog (where the origin signal is detected) or the
stroke end (mechanical stopper) is detected.
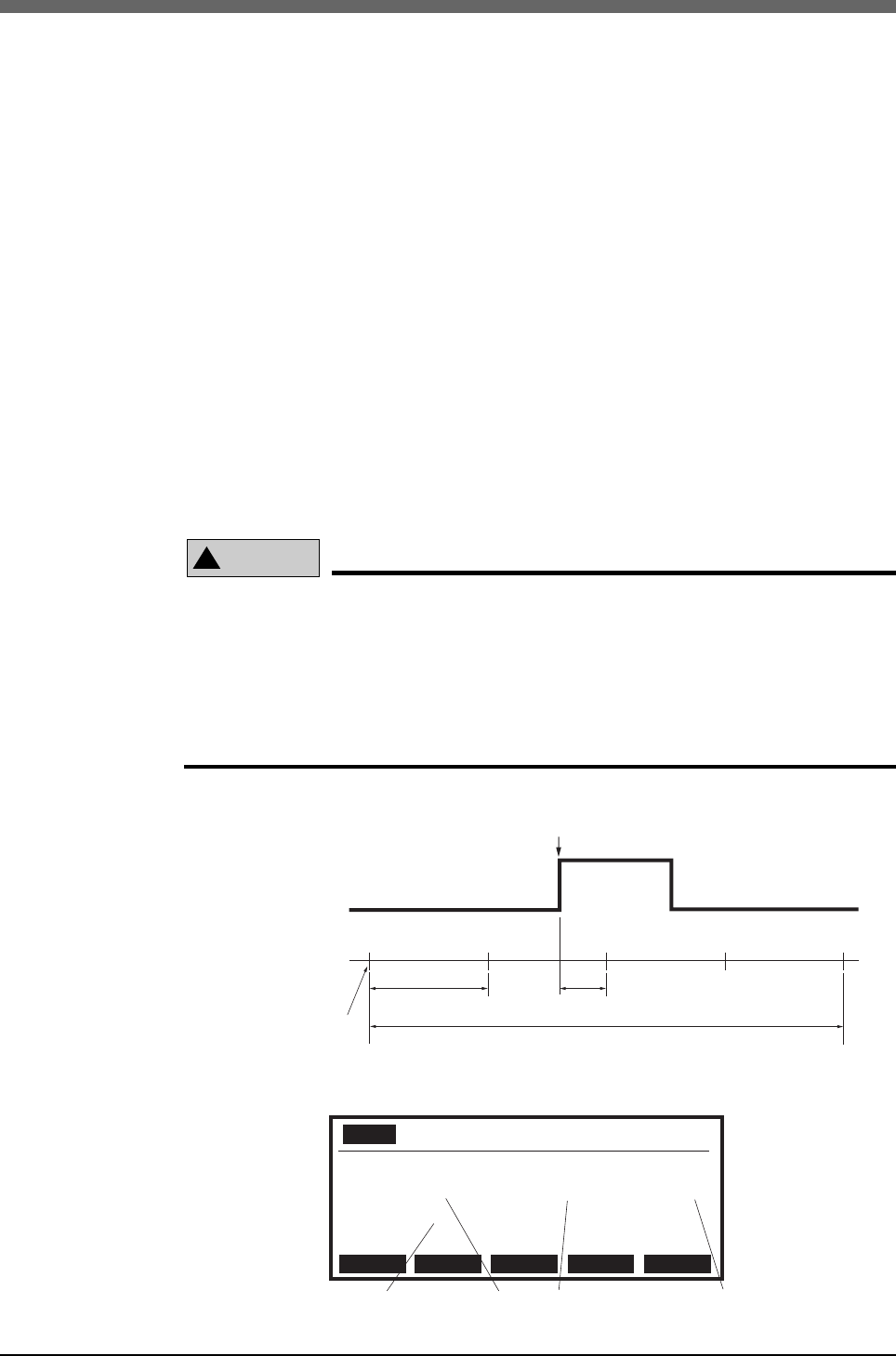
The machine reference means the position relationship between the position where
the robot detects the origin signal and the position where the absolute reset can be
performed soon after the origin signal detection. (See Fig. 4-6.) The machine
reference is expressed in the ratio of interval A to interval B shown in Fig. 4-6.
Interval A is the minimum distance between the positions where absolute reset
can be performed and interval B is the distance between the position where the
origin signal is detected and the position where absolute reset can be performed
soon after the origin signal detection.
The machine reference value is displayed on the optional MPB screen. (Unit: %)
Machine reference value = B/A × 100(%)
!
CAUTION
It is necessary for the machine reference to be adjusted in a specified range in
order to keep the repeatability precision of the absolute reset position. (Factory-
adjusted at shipment.)
Refer to "Chapter 4, 3-4 Adjusting the machine reference" for the machine ref-
erence adjustment method .
Recommended machine reference value: 40 to 60% (26 to 74% only for Z-axis)
Machine reference
Origin signal detection
Origin signal
Resolver
Positions where absolute reset
can be performed
One motor revolution
BA
ON
OFF
Machine reference display on MPB screen
MANUAL >RST. ABS 50% [MG] [S0H0J]
Machine reference (%)
M1= 50
M4= 66
M2= 56
M3= 52
M1 M2 M3 M4 M5
R-axis
X-axis Y-axis Z-axis
MPB
Fig. 4-6