



















4-3
CHAPTER 4 Adjustment
3-1 Absolute reset method
3-1-1 YK120X series (YK120X, YK150X)
3-1-1-1 Sensor method (R-axis)
In the sensor method, the target axis is automatically operated for the absolute
reset, and the absolute reset is performed at the position where the proximity
sensor provided on the target axis detects the detection area (dog).
The absolute reset in the sensor method can be executed with the teaching pen-
dant (MPB), RS-232C communication, and dedicated input.
WARNING
Serious injury might occur from physical contact with the robot during opera-
tion.
Never enter within the robot movement range during absolute reset.
!
CAUTION
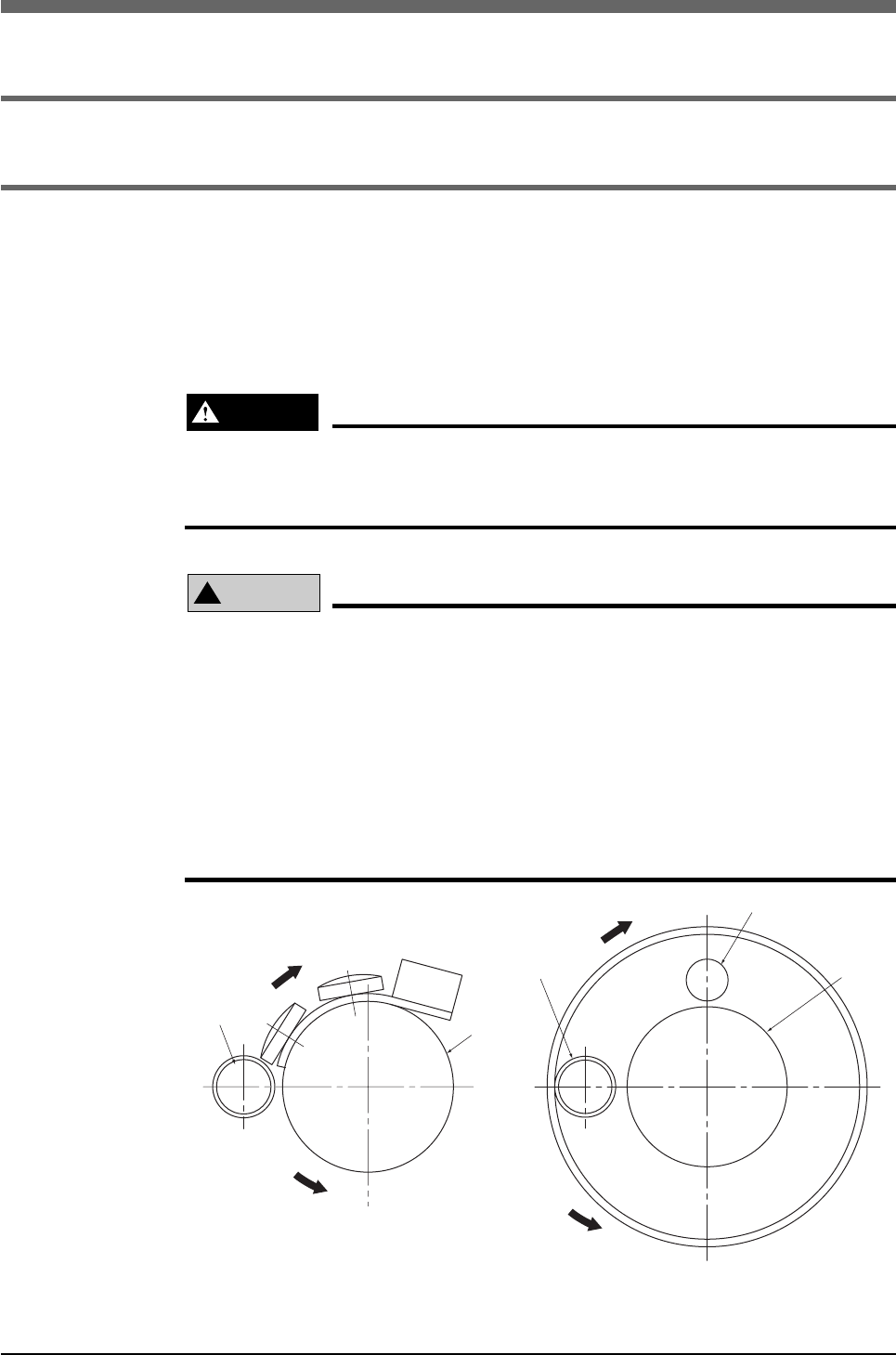
The origin cannot be detected in any axis which is not positioned on the plus
side from the origin (See Fig. 4-1.) before starting the return-to-origin opera-
tion. (Factory setting at shipment.)
In this case, press the STOP key to interrupt the return-to-origin operation,
move the target axis to the plus side of the origin, and reperform the origin
return operation.
If the return-to-origin operation is not stopped, the robot will continue moving
and could collide with the peripheral devices. The R-axis does not have a me-
chanical stopper, so the wiring and piping installed on the end effector could
become entangled.
Plus side
Minus side
Plus side
Minus side
R-axis Sensor
R-axis
R-axis dog
R-axis Sensor
R-axis
YK120X, YK150X YK120XC, YK150XC
Fig. 4-1 View of R-axis from below