



















┌─────────┐ ┌─────────┐ ┌─────────┐ ┌─────────┐
│ CPU ├───┤ L2 Cache├───┤ Memory ├───┤ Memory │
│ ├───┤ ├───┤ Control.├───┤ │
└─────────┘ └─────────┘ └──┬───┬──┘ └─────────┘
│ │
│ │
┌──┴───┴──┐
│ I/0 │
│ Control.│
└──┬───┬──┘
│ │
│ │
┌──────────────────────────────┴───┴────────────────┐
││
│ BUS ISA/EISA/MCA/VL/PCI │
││
└────┬─┬───┬─┬───────────────────────┬─┬──┬─┬───────┘
││ ││ ││ ││
└─┘ └─┘ └─┘ └─┘
Slots SCSI VGA
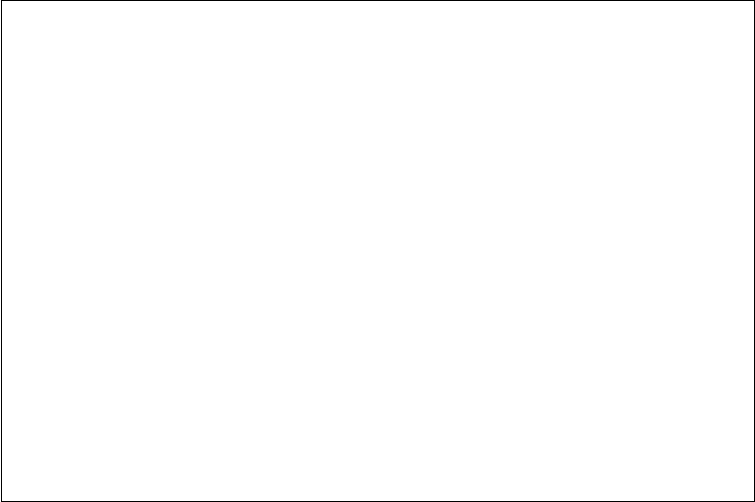
Figure 4. Dual Path Bus Implementation
Without a dual path bus, there is often contention for system resources such as
main memory. When contention between the processor and a bus master
occurs, one has to wait for the other to finish its memory cycle before it can
proceed. Thus, fast devices like processors have to wait for much slower I/O
devices, slowing down the performance of the entire system to the speed of the
slowest device. This is very costly to the overall system performance.
1.3.4 SynchroStream Technology
SynchroStream is an extension of the dual bus path technique. The
SynchroStream controller synchronizes the operation of fast and slow devices
and streams data to these devices to ensure that all devices work at their
optimum levels of performance.
It works much like a cache controller in that it pre-fetches extra data on each
access to memory and buffers this data in anticipation of the next request. When
the device requests the data, the IBM SynchroStream controller provides it
quickly from the buffer and the device continues working. It does not have to
wait for a normal memory access cycle.
When devices are writing data into memory, the IBM SynchroStream controller
again buffers the data, and writes it to memory after the bus cycle is complete.
Since devices are not moving data to and from memory directly, but to the
SynchroStream controller, each device has its own logical path to memory. The
devices do not have to wait for other, slower devices.
8 NetWare Integration Guide