



















TMS320C6712D
FLOATINGĆPOINT DIGITAL SIGNAL PROCESSOR
SPRS293 − OCTOBER 2005
95
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251−1443
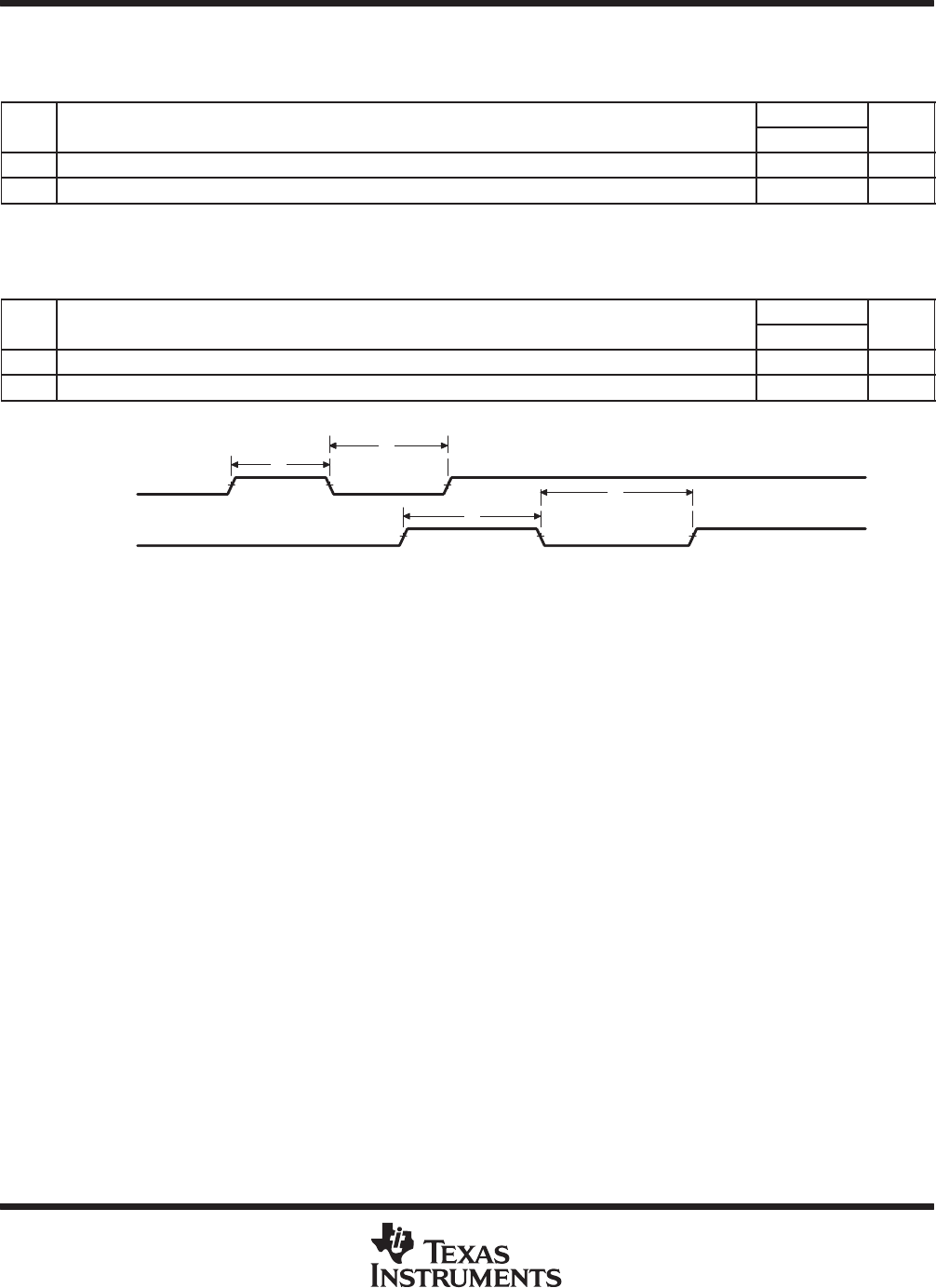
TIMER TIMING
timing requirements for timer inputs
†
(see Figure 47)
NO.
−150
UNIT
NO.
MIN MAX
UNIT
1 t
w(TINPH)
Pulse duration, TINP high 2P ns
2 t
w(TINPL)
Pulse duration, TINP low 2P ns
†
P = 1/CPU clock frequency in ns. For example, when running parts at 150 MHz, use P = 10 ns.
switching characteristics over recommended operating conditions for timer outputs
†
(see Figure 47)
NO.
PARAMETER
−150
UNIT
NO.
PARAMETER
MIN MAX
UNIT
3 t
w(TOUTH)
Pulse duration, TOUT high 4P−3 ns
4 t
w(TOUTL)
Pulse duration, TOUT low 4P−3 ns
†
P = 1/CPU clock frequency in ns. For example, when running parts at 150 MHz, use P = 10 ns.
TINPx
TOUTx
4
3
2
1
Figure 47. Timer Timing