



















L2002 Inverter
Configuring
Drive Parameters
3–5
Operational Modes
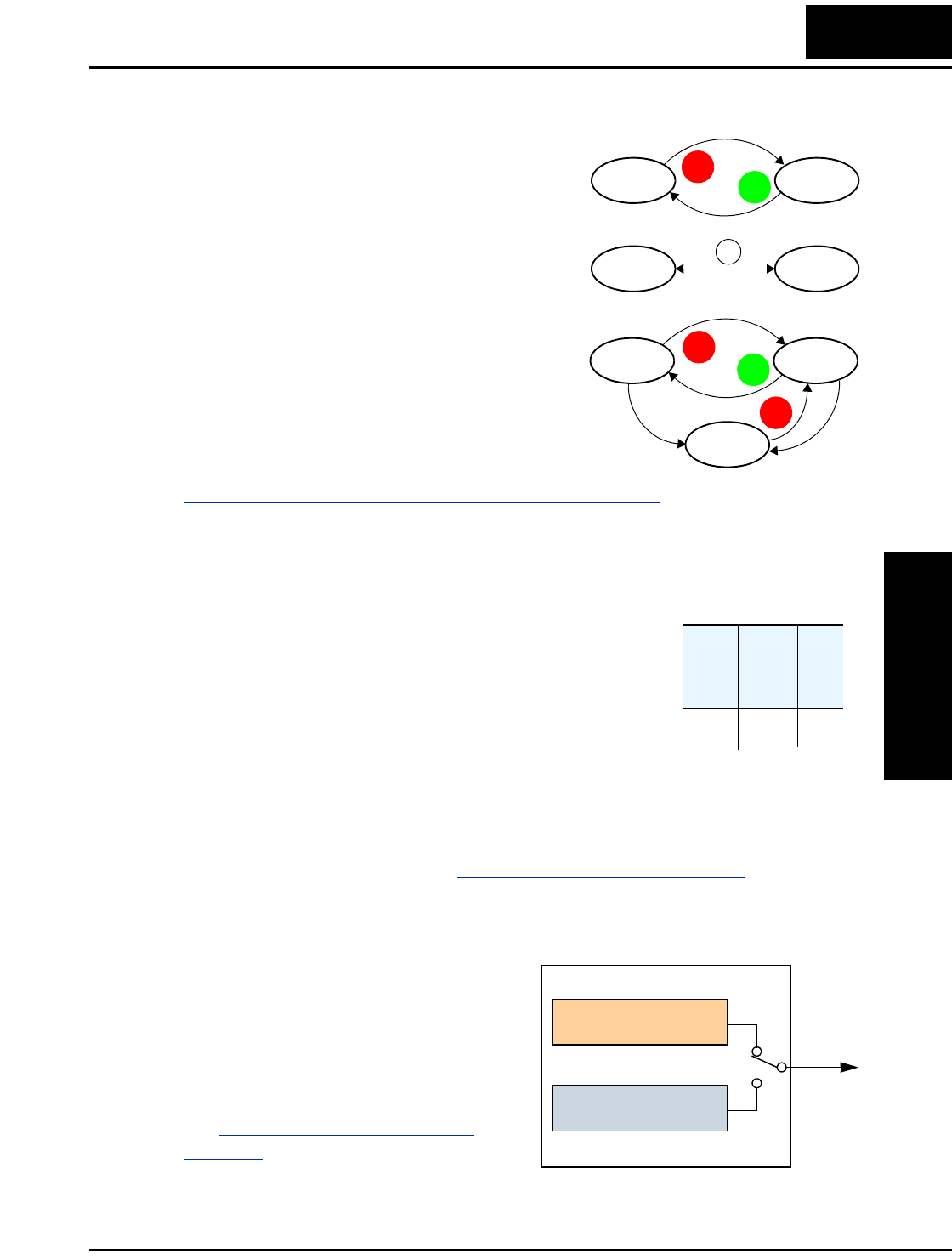
The RUN and PRG LEDs tell just part of the story;
Run Mode and Program Modes are independent
modes, not opposite modes. In the state diagram to
the right, Run alternates with Stop, and Program
Mode alternates with Monitor Mode. This is a very
important ability, for it shows that a technician can
approach a running machine and change some
parameters without shutting down the machine.
The occurrence of a fault during operation will
cause the inverter to enter the Trip Mode as shown.
An event such as an output overload will cause the
inverter to exit the Run Mode and turn OFF its
output to the motor. In the Trip Mode, any request
to run the motor is ignored. You must clear the
error by pressing the Stop/Reset switch. See
“
Monitoring Trip Events, History, & Conditions” on page 6–5.
Run Mode Edits
The inverter can be in Run Mode (inverter output is controlling motor) and still allow
you to edit certain parameters. This is useful in applications that must run continuously.
The parameter tables in this chapter have a column titled “Run
Mode Edit.” An Ex mark ✘ means the parameter cannot be
edited; a Check mark ✔ means the parameter can be edited.
The table example to the right contains two adjacent marks
“✘ ✔”. These two marks (that can also be“✘ ✘” or “✔ ✔”)
correspond to low-access or high-access levels to Run Mode
edits (note Lo and Hi in column heading).
The Software Lock Setting (parameter B031) determines when Run Mode access is in
effect and access permission in other conditions, as well. It is the responsibility of the
user to choose a useful and safe software lock setting for the inverter operating condi-
tions and personnel. Please refer to “
Software Lock Mode” on page 3–39.
Control Algorithms
The motor control program in the L2002
inverter has two sinusoidal PWM switching
algorithms. The intent is that you select the
best algorithm for the motor characteristics
in your application. Both algorithms
generate the frequency output in a unique
way. Once configured, the algorithm is the
basis for other parameter settings as well
(see “
Torque Control Algorithms” on
page 3–18). Therefore, choose the best
algorithm early in your application design
process.
Run Stop
Monitor Program
RUN
STOP
RESET
FUNC.
Run Stop
Trip
Fault
Fault
STOP
RESET
RUN
STOP
RESET
Run
Mode
Edit
Lo Hi
✘ ✔
Output
Variable freq. control,
constant torque
Variable freq. control,
reduced torque
Inverter Control Algorithms