



















“A” Group: Standard Functions
Configuring
Drive Parameters
3–16
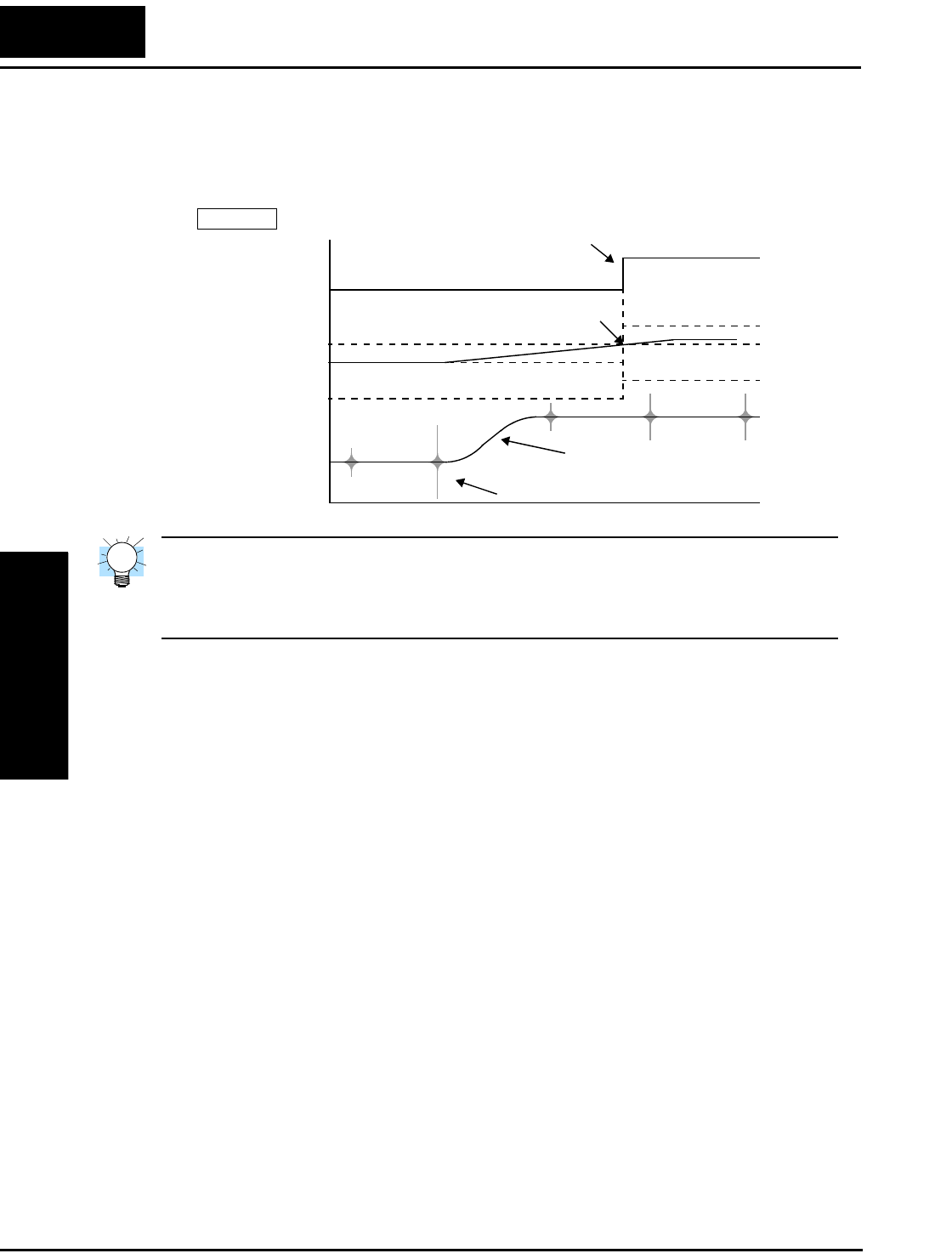
The example graph below shows a typical analog input waveform. The filter removes the
noise spikes. When a speed change (such as level increase) occurs, the filter naturally
has a delayed response. Due to the deadband feature (A016=17), the final output
changes only when the 16-sample average moves past the deadband threshold.
TIP: The deadband feature is useful in applications that require a very stable output
frequency but use an analog input for the speed reference. Example application: A
grinding machine uses a remote potentiometer for operator speed input. After a setting
change, the grinder maintains a very stable speed to deliver a uniform finished surface.
Multi-speed and Jog Frequency Setting
The L2002 inverter has the capability to store and output up to 16 preset frequencies to
the motor (A020 to A035). As in traditional motion terminology, we call this multi-speed
profile capability. These preset frequencies are selected by means of digital inputs to the
inverter. The inverter applies the current acceleration or deceleration setting to change
from the current output frequency to the new one. The first multi-speed setting is dupli-
cated for the second motor settings (the remaining 15 multi-speeds apply only to the first
motor).
The jog speed setting is used whenever the Jog command is active. The jog speed setting
range is arbitrarily limited to 10 Hz, to provide safety during manual operation. The
acceleration to the jog frequency is instantaneous, but you can choose from three modes
for the best method for stopping the jog operation.
Hz
t
“0”
Deadband
A016=17
noise spikes
16-sample avg.
+0.1
Output freq.
reference
Analog input
New deadband
speed increase given
–0.2
Threshold exceeded
+0.1
“0”
–0.2
Small step-change