



















KS152JB Universal Communications Controller
Technical Specifications
Kawasaki LSI USA, Inc. Page 43 of 120 Ver. 0.9 KS152JB2
3.2.6 RESOLUTION OF COLLISIONS
How the GSC responds to a detected collision depends on what it was doing at the time the colli-
sion was detected. What it might be doing is either transmitting or receiving a frame, or it might
be inactive.
GSC Inactive
If the GSC is already in the process of receiving a frame at the time the collision is detected, its
response depends on whether the first byte of the frame has been transferred into RFIFO yet or
not. If that hasn’t occurred, the GSC simply aborts the reception, but takes no other action unless
DCR has been selected. If DCR has been selected, the GSC participates in the resolution algo-
rithm.
If the reception has already progressed to the point where a byte has been transferred to RFIFO by
the time the collision is detected, the receiver is disabled (GREN = 0), and the Receive Error
Interrupt flag RCABT is set. If DCR has been selected, the GSC participates in the resolution
algorithm.
Jam
The jam signal is generated by any 8XC152 that is involved in transmitting a frame at the time a
collision is detected at its GRXD pin. This is to ensure that if one transmitting station detects a
collision, all the other stations on the network will also detect a collision.
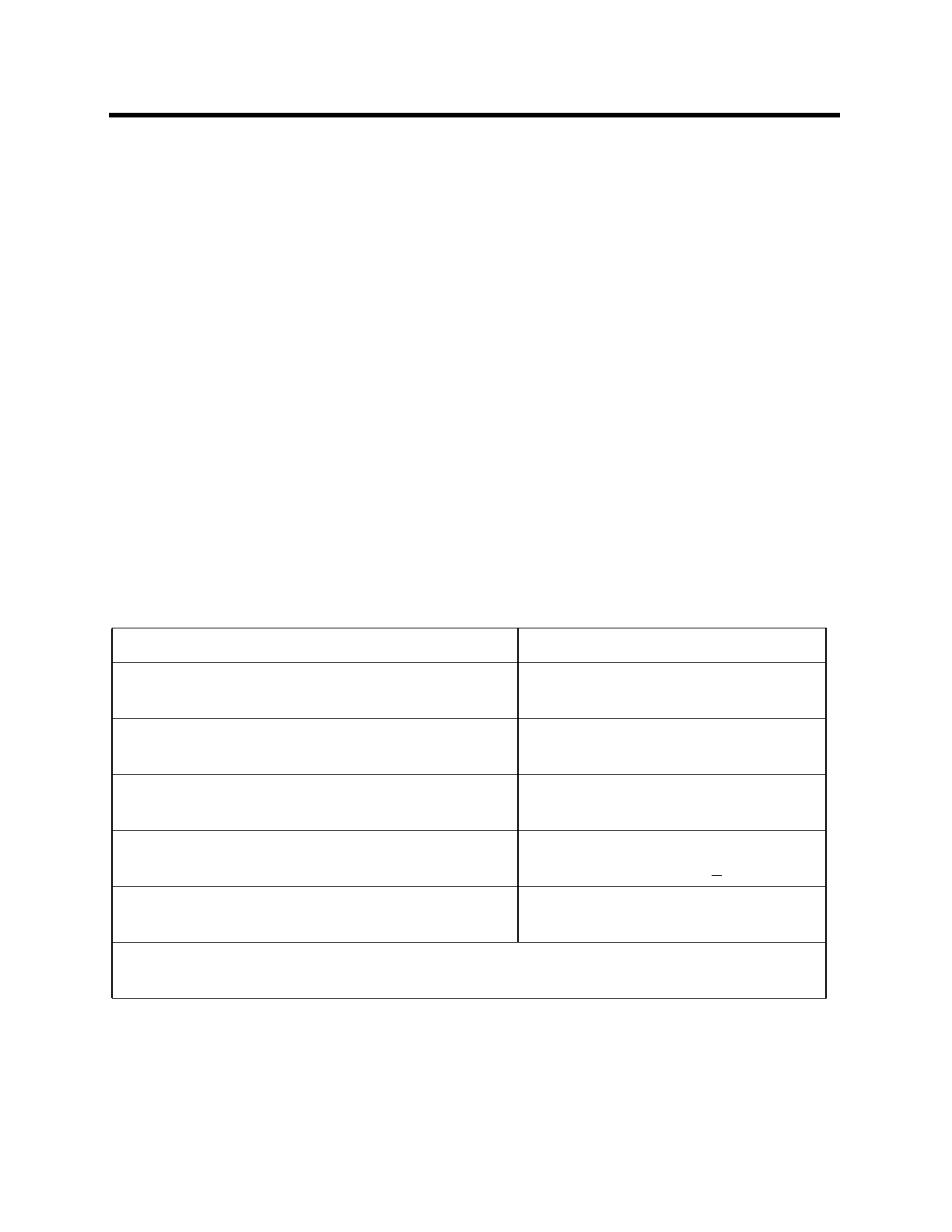
Table 11: Response to a Detected Collision.
What the GSC was doing Response
nothing None, Unless DCR =1.
If DCR = 1, begin DCR countdown
Receiving a Frame, first byte not in RFIFO yet. None, unless DCR = 1.
If DCR = 1, begin DCR countdown.
Receiving a Frame, first byte already in RFIFO. Set RCABT, clear GREN.
If DCR = 1, begin DCR countdown.
Transmitting a Frame, first byte still in TFIFO Execute jam/backoff.
Restart if collision count
< 8.
Transmitting a Frame, first byte already taken from
TFIFO
Execute jam/backoff.
Set TCDT, clear TEN.
Note: References to DCR and the DCR Countdown have to do with the Deterministic Colli-
sion Resolution Algorithm.