



















B-10 Command Set MN1851
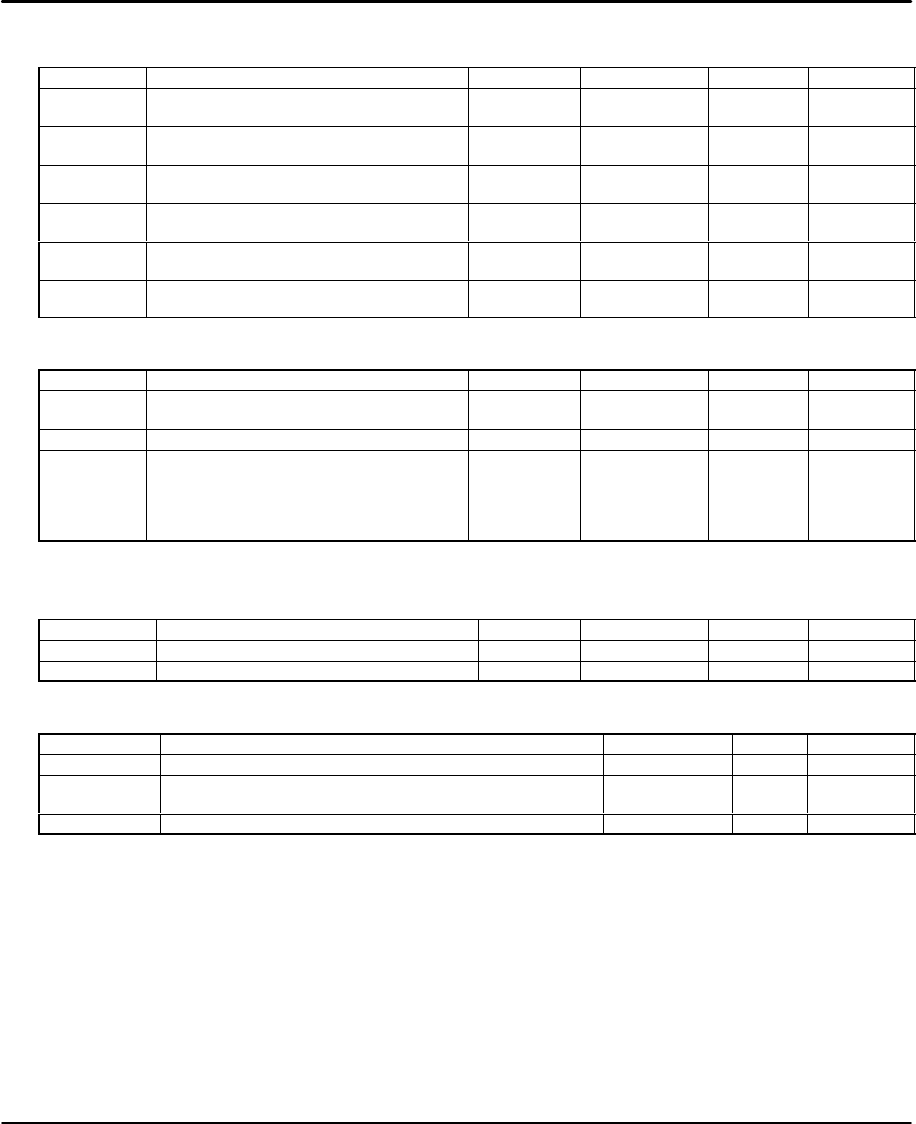
Queries of System Variables, Status, Faults
Single Values:
Command Description Units Range Default E
2
/ Par. set
ACTU
CUR.ACTU
Query for actual current U 0.01 A – / –
ACTV
CUR.ACTV
Query for actual current V 0.01 A – / –
ANAIN
SYS.ANAIN
Query for analog input mV – / –
POS,
RPOS,
Queries motor position – / –
SYS.POS
POS.POS
Resolver bits / encoder counts – / –
VEL
VEL.VEL
Query feedback velocity RPM
Data Record ( REC. prefixed ) Parameters:
Command Description Units Range Default E
2
/ Par. set
REC.GAP Specify gap between recording samples in
number of servo loops (0.5 ms)
– 0 : 65535 1 E / –
REC.TIME Specify recording time 0.5 ms 1:65535 1000 – / –
REC.VAR1,
REC.VAR2
Specify recording variable: “POS”: position,
“REF”: velocity command, “VEL”: velocity,
“CUR”: current command, “ACTU”: current
U, “ACTV”: current V, “FE”: position
following error.
– s. left “POS”
“VEL”
– / –
Data Record ( REC. prefixed ) Variable:
Command Description Units Range Default E
2
/ Par. set
REC.VFREE1 Specify recording address for REC.VAR1 – Unsign.Long – / –
REC.VFREE1 Specify recording address for REC.VAR2 – Unsign.Long – / –
Methods:
Command Description Parameter Units Range
GETD Gets data from recording buffer in decimal form. – – –
GETX Gets data from recording buffer in hex form, data buffer is
cleared afterwards
– – –
REC Starts(“on”) / stops (“off”) recording process start / stop – “on”, “off”