



















Command Set B-15MN1851
Position Controller
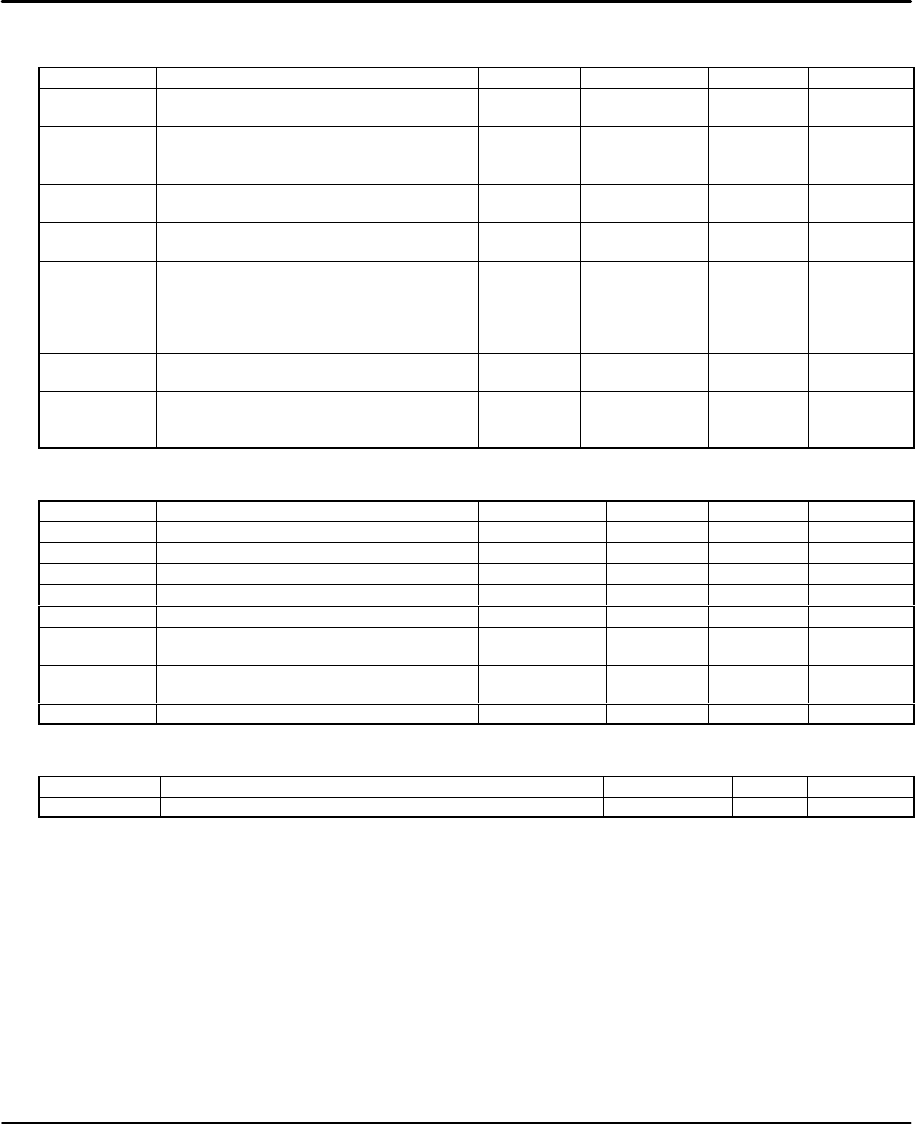
Position Controller Parameters:
Command Description Units Range Default E
2
/ Par. set
POS.FFA Queries/updates acceleration FF factor
unsigned integer ranged 0..100
– 25 : 100 E / P
POS.FFTYPE Queries / updates FF type with position
controller redesign 0 – FF none, 1 –
velocity FF, 2 – acceleration FF
– 0 : 2 E / P
POS.FFV Queries / updates velocity FF factor
unsigned integer ranged within 0..100
– 25 : 100 E / P
POS.KP Queries / updates position gain unsigned
integer ranged within 25.. 200
– 25 : 100 E / P
POS.FEWRN Queries / updates FE warning limits
resolver: 1/4096 of revolution,
encoder: 1/(4*SYS. encres) of revolution
integer, > 0 (< 0: disabled)
1/4096
(resolver)
1/(4*SYS.
encres)
encoder
–32768 : 32767 E / P
POS.FEFAT Queries / updates FE fatal limits 1/4096 of
revolution, integer,
1/4096 of
revolution
–32768 : 32767 E / P
POS.IPOS Queries / updates FE in position limits
1/4096 of revolution, integer, > 0 (< 0:
disabled)
1/4096 of
revolution
–32768 : 32767 E / P
Variables:
Command Description Units Range Default E
2
/ Par. set
POS.MPFE Queries maximum position following error 1/4096 of rev. – / –
MPFE – / –
POS.PFE Queries position following error 1/4096 of rev. – / –
PFE – / –
PREF Queries for position reference 1/4096 of rev. – / –
POS.REF Queries position controller reference,
1/4096 of revolution
1/4096 of rev. – / –
POS.FEST Returns follow error status: 0 – normal,
1 – in position, 2 –warning, 3 – error
– 0 : 3 – / –
FEST – / –
Methods:
Command Description Parameter Units Range
PRST Resets position following error – – –