



















2-20
Confirming the operation
2Unpacking to Installation
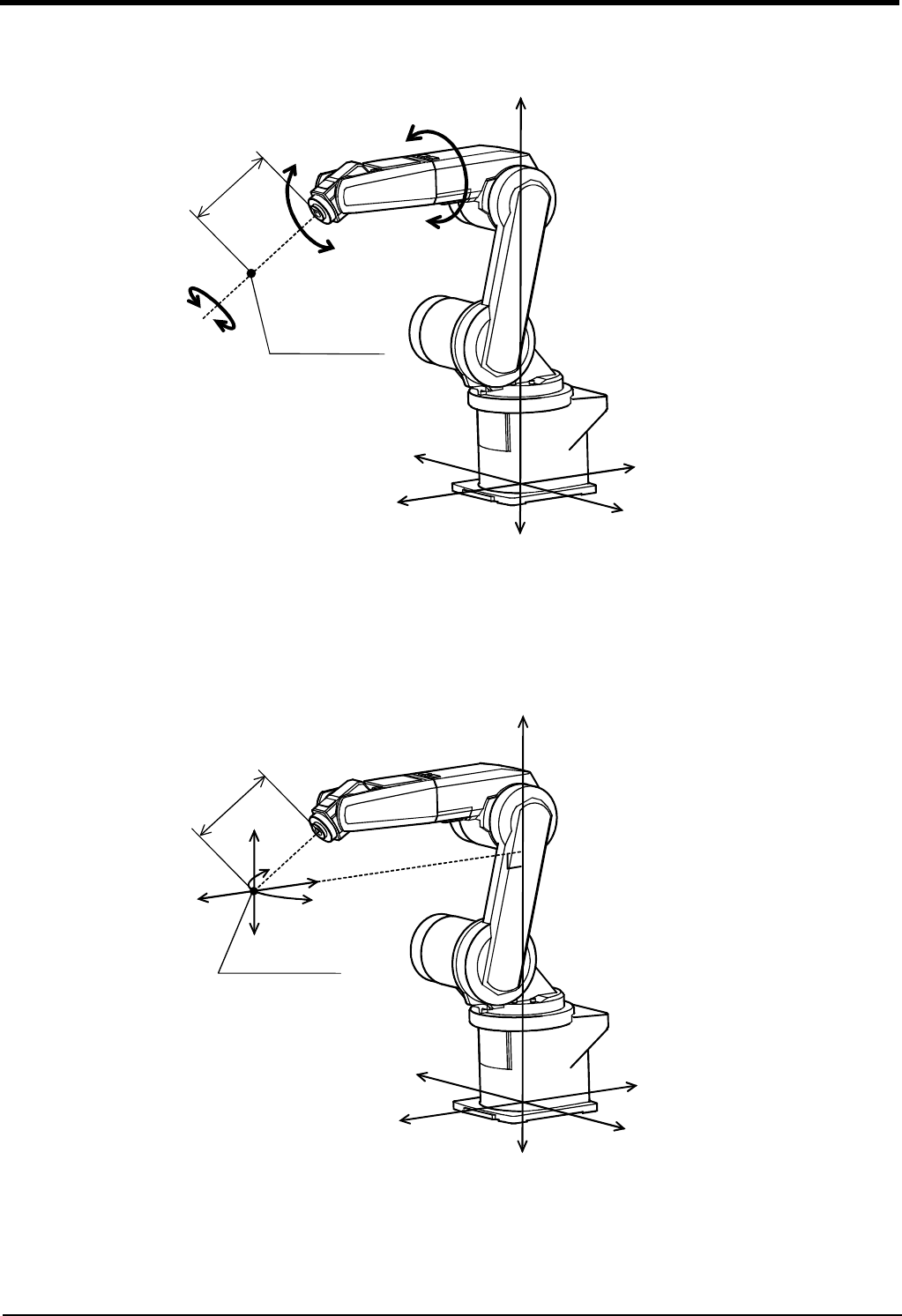
Fig.2-13 : 3-axis XYZ jog operation
Fig.2-14 : CYLINDER jog operation
J5
J6
+
-
-
+
+X
+Y
+Z
-Z
-Y
-X
T
o
o
l
l
e
n
g
t
h
Control point
J4
+
-
* The axis moves straight along the base coordinate system. At this time, the flange surface
posture is not maintained.
Also, the flange surface posture changes. The flange surface position changes at this time.
+X
+Y
+Z
-Z
-Y
-
X
T
o
o
l
l
e
n
g
t
h
Control point
Radius
Vertical
Arc
* The current position is set as the arc centering on the Z axis, and the axis moves along that arc, expands
and contracts in the radius direction, and moves vertically. At this time, the flange surface posture is
maintained. Also, while maintaining the flange surface position, the flange surface posture changes.