



















5Maintenance and Inspection
Resetting the origin
5-63
5.5.3 ABS origin method
When the origin setting of the robot is performed for the first time, this product records the angular position of the
origin within one rotation of the encoder as the offset value. If the origin setting is performed according to the
ABS origin method, this value is used to suppress variations in the origin setting operations and to reproduce the
initial origin position accurately.
This operation is carried out with the teaching pendant. Set the [MODE] switch on the front of the controller to
"TEACH", and set the [ENABLE/DISABLE] switch on the teaching pendant to "ENABLE" to enable the teaching
pendant.
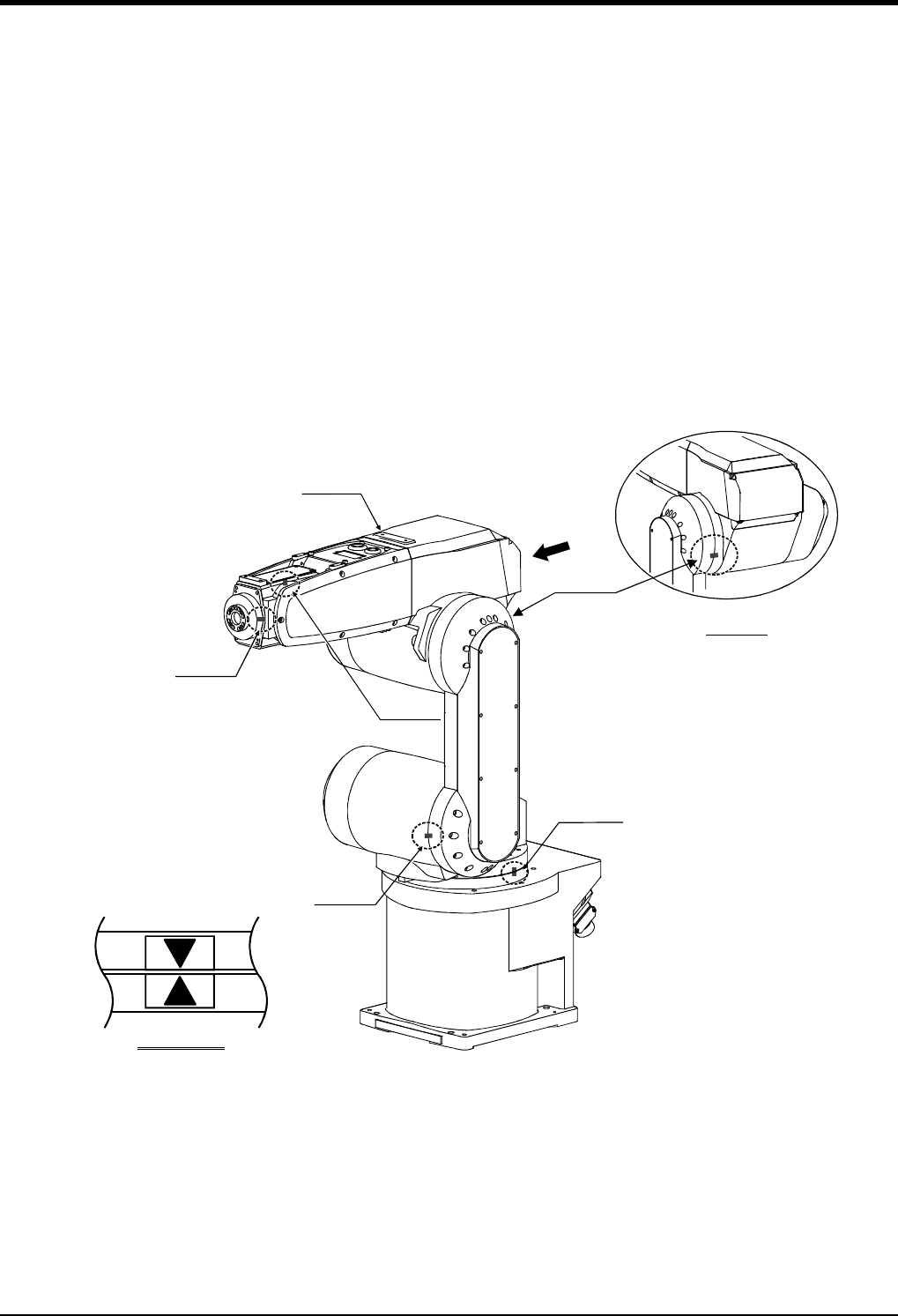
First, set to the ABS mark arrow of the axis for which the origin is to be set with jog operation. This can be set for
all axes simultaneously or each axis independently.
When setting the ABS mark, always view the operations from the mark, and set at the end of the triangular mark.
The positions where the ABS mark is attached are shown in Fig. 5-28. Refer to "(1)JOINT jog operation" on page
21" for details on the jog operation.
Fig.5-8 : ABS mark attachment positions
A
View A
J3 axis
ABS mark
J4 axis
J6 axis
J5 axis
J2 axis
J1 axis