



















2Unpacking to Installation
Confirming the operation
2-19
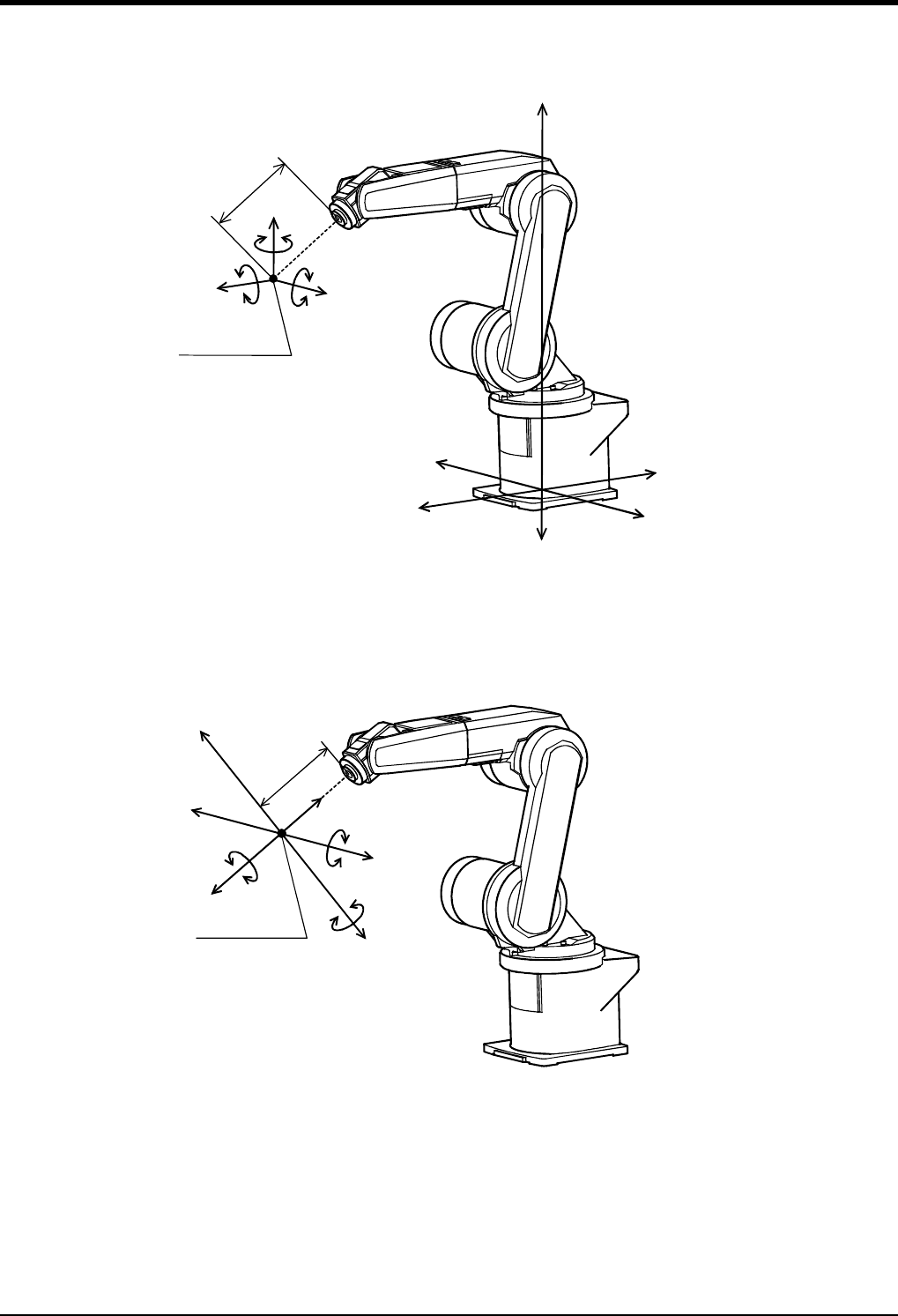
Fig.2-11 : XYZ jog operation
Fig.2-12 : TOOL jog operation
+X
+Y
+Z
-Z
-Y
-X
T
o
o
l
l
e
n
g
t
h
+
+X
+Y
+Z
-
+
-
-
+
Control point
* While maintaining the flange surface posture, the axis moves straight along the base
coordinate system.
Also, while maintaining the flange surface position, the flange surface posture changes.
-
+
-
+
-
+
+X
+Z
Control point
T
o
o
l
l
e
n
g
t
h
-Z
-X
-Y
+Y
* While maintaining the flange surface posture, the axis moves straight along the tool
coordinate system.
Also, while maintaining the flange surface position, the flange surface posture changes.