



















3Installing the option devices
.Changing the operating range
3-37
(2) Setting the parameters
1) Change the values of the first element (J1 axis minus side) and second element (J1 axis plus side) of the joint
operating range parameter MEJAR. Set the value to the angle corresponding to the position where the
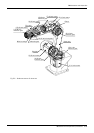
operating range change stopper was inserted in
"(1)Setting the robot arm"above.
Refer to the separate "Instruction Manual/Detailed Explanation of Functions and Operations" for details on
changing the parameter.
2) When completed changing the parameters, turn the controller power OFF and ON. Move the waist axis to the
operating range limit with
JOINT jog operation, and confirm that the limit over occurs and the robot stops at
the angle changed for both the +/- sides.
This completes setting the parameters and the changing of the operating range.