



















4-5
4. Troubleshooting
CAST-AU4/B2521E
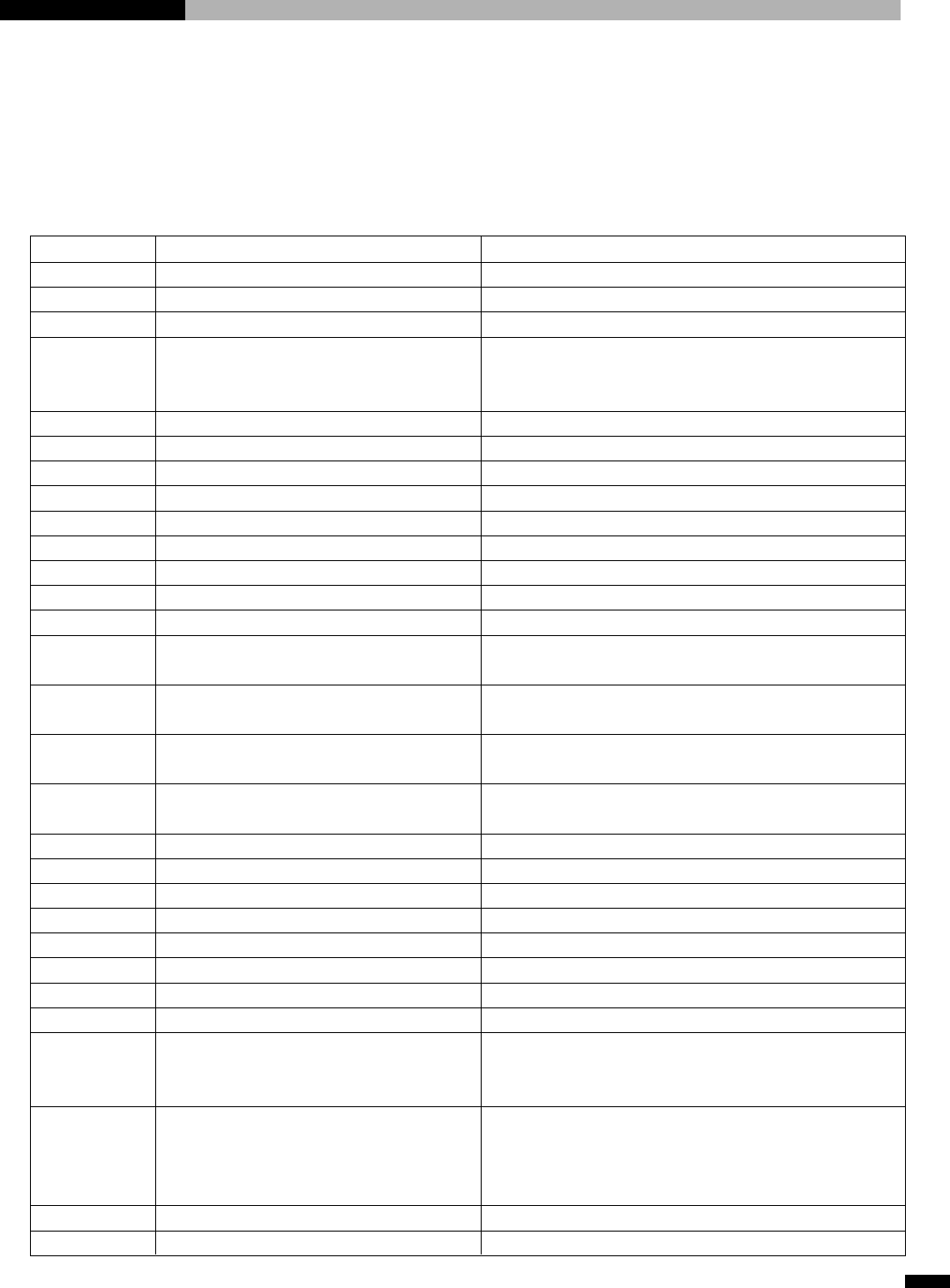
Check the error code number E*** on display and find out causes and countermeasures referring to the
following table.
When the machine does not operate normally, check the error contents referring to the following table.
For the contents that are unique to the respective applications, refer to the Operation Manual of the
memory card (RK card), and take the appropriate measures.
Error No.
E000 ~ E030
E031
E100
E110
E111
E112
E113
E114
E115
E116
E117
E118
E119 ~ E124
E130
E131
E132
E133
E134
E135
E136
E137
E138
E139
E140
E141
E154
E155
E200 ~ E204
E300
Causes
CPU board is defective
Internal memory overflows
System task not present error (full open)
Object code error
System task command error (full open)
Robot command error
I/O number error
Point data not present error
Error of point number specified
Parameter error
Array number error
Integer value out of range error
Syntax error
X-axis (tool axis) out of operation range
error
Y-axis (work axis) out of operation range
error
Z-axis (tool axis) out of operation range
error
R-axis (tool axis) out of operation range
error
X-axis system limit error
Y-axis system limit error
Z-axis system limit error
R-axis system limit error
X-axis point limit error
Y-axis point limit error
Z-axis point limit error
R-axis point limit error
Speed is too fast for the distance between
the two points during interpolation
operation
The circular auxiliary point (ENTER B)
and start point/end point are aligned on a
straight line during circular interpolation
operation. Circle is taught in 360 degrees
PLC program error (full open)
Emergency stop is triggered
Solutions
Replace the Base board
Delete the unnecessary programs
Install the system task
When the Power lamp lights up in red, replace the battery.
If it does not corresponds to any of the above contents,
contact Sony sales or service office.
Correct the program
Correct the program of system task or peripheral task
Correct the I/O number
Load the point number. Replace the CPU board
Correct the point number
Correct the variables specified
Correct the array number
Correct the integer value
Correct syntax
Correct the target point to which the tool moves
Correct the target point to which the tool moves
Correct the target point to which the tool moves
Correct the target point to which the tool moves
Correct the speed so as not to exceed the range
Correct the speed so as not to exceed the range
Correct the speed so as not to exceed the range
Correct the speed so as not to exceed the range
Correct the speed so as not to exceed the range
Correct the speed so as not to exceed the range
Correct the speed so as not to exceed the range
Correct the speed so as not to exceed the range
Increase the distance between the two points, or decrease
the speed
Correct the position of the circular auxiliary point, or
divide the movement into smaller segments of less then
360 degrees
Correct the program
Cancel the emergency stop switch