



















Chapter 7 Servo Parameters|ASDA-B Series
Revision January, 2009 7-81
Setting value of P2-18 ~ P2-20: 06
DO Name DO Function Description Control Mode
TQL
At Torques limit. TQL is activated when the drive has detected that the
motor has reached the torques limits set by either the parameters P1-12
~ P1-14.
P, S
Setting value of P2-18 ~ P2-20: 07
DO Name DO Function Description Control Mode
ALRM
Servo alarm (Servo fault) activated. ALRM is activated when the drive
has detected a fault condition.
P, S, T
Setting value of P2-18 ~ P2-20: 08
DO Name DO Function Description Control Mode
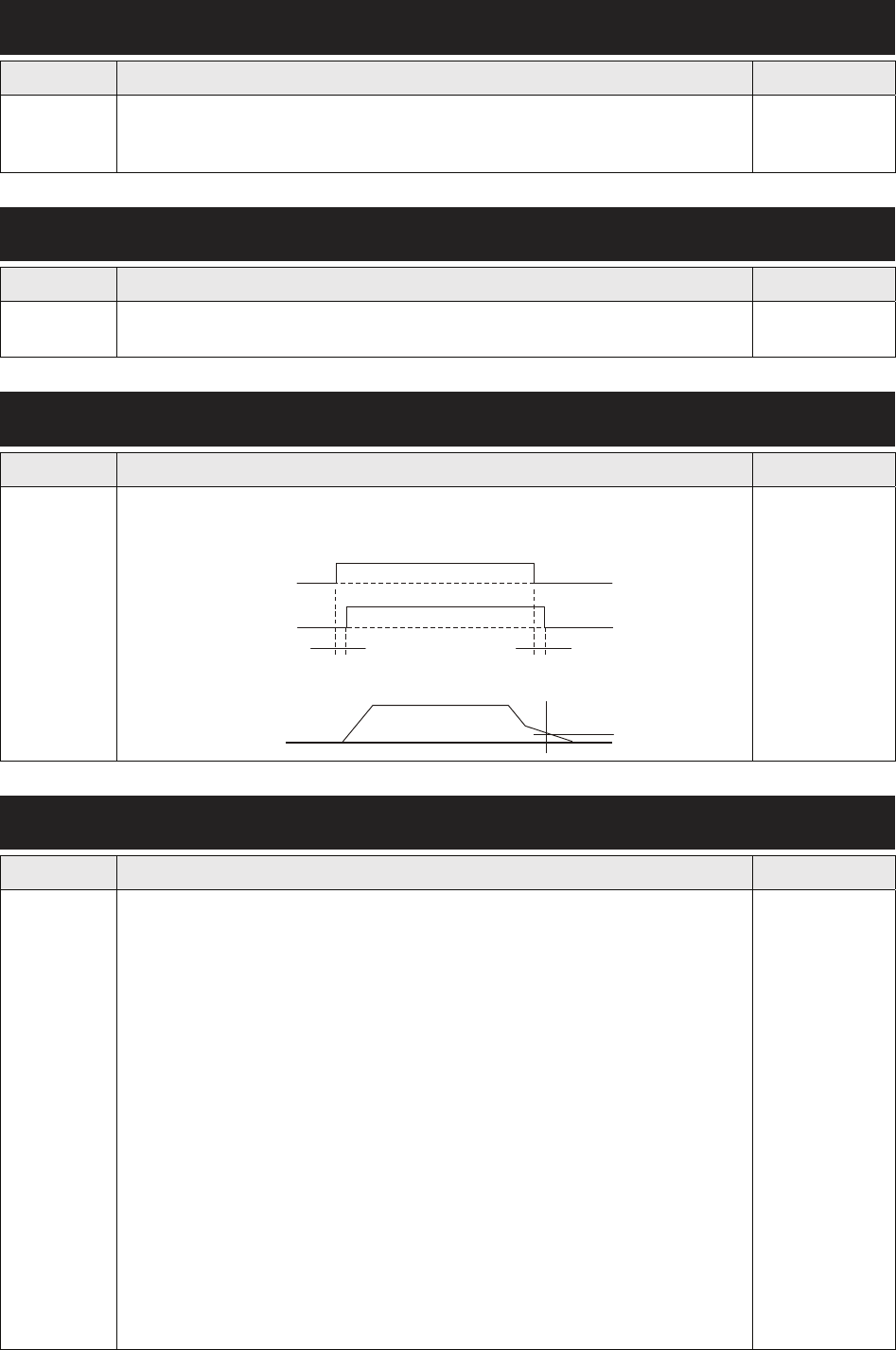
BRKR
Electromagnetic brake control. BRKR is activated actuation of motor
brake. (Please refer to parameters P1-42 ~ P1-43)
SON
OFF
BRKR
OFF
Motor
Speed
O
N
ON
OFF
OFF
MBT1(P1-42)
ZSPD
(P1-38)
MBT2(P1-43)
P, S, T
Setting value of P2-18 ~ P2-20: 09
DO Name DO Function Description Control Mode
OLW
Output overload warning. OLW is activated when the servo drive has
detected that the motor has reached the output overload level set by
parameter P2-37.
This parameter is used to set output overload level. When the motor has
reached the output overload level set by parameter P2-37, the motor will
send a warning to the drive. After the drive has detected the warning,
the DI signal OLW will be activated.
tOL = Permissible Time for Overload x setting value of P2-37
When overload accumulated time (continuously overload time) exceeds
the value of tOL, the overload warning signal will output, i.e. DO signal,
OLW will be ON. However, if the overload accumulated time
(continuously overload time) exceeds the permissible time for overload,
the overload alarm (ALE06) will output.
For example:
If the setting value of parameter P2-37 (Overload Warning Level) is
60%, when the permissible time for overload exceeds 8 seconds at
200% rated output, the overload fault (ALE06) will be detected and
shown on the LED display.
At this time, tOL = 8 x 60% = 4.8 seconds
P, S, T