



















“A” Group: Standard Functions
Configuring
Drive Parameters
3–16
Frequency-related Functions
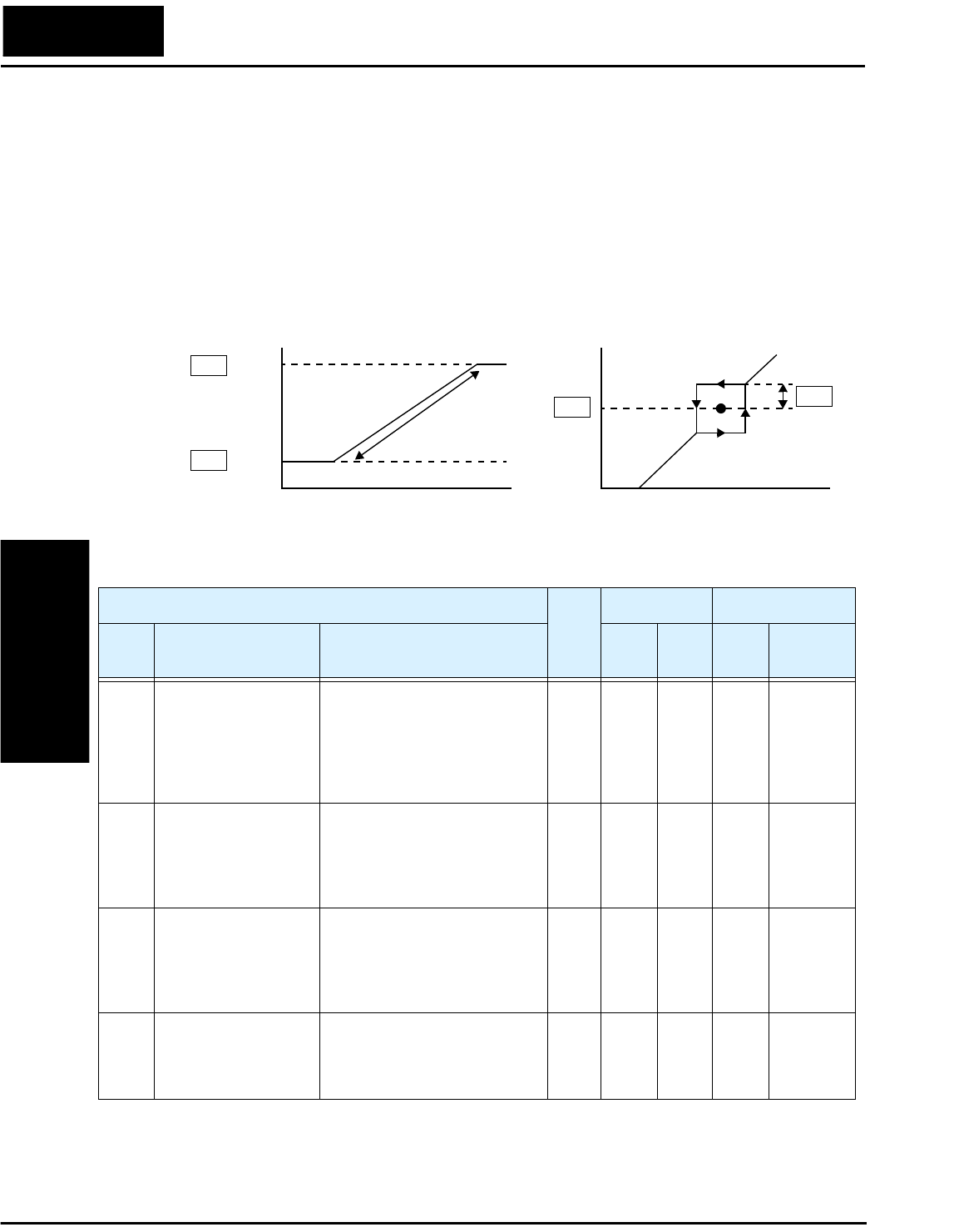
The inverter output generates a variable-frequency waveform that determines the motor
speed (minus slip losses). You can configure the lower frequency limit to be greater than
zero as shown in the graph (below left). The upper limit must not exceed the rating of the
motor or capability of the machinery. Some motors or machines exhibit resonances at a
particular speed, which can be destructive. The inverter has up to three jump frequencies
(see graph, below right) with hysteresis around them to cause the inverter output to skip
around the sensitive frequency values.
Output frequency
A62
A61
Upper
limit
Frequency command
Lower
limit
Settable
range
Output frequency
A64
A63
Frequency command
Jump
frequency
“A” Function
Run-
time
Edit
Defaults DOP,DRW,DOP+
Func.
Code
Name Description
EU/
US
Units
Func.
Code
Name
A61 Frequency upper limit
setting
Sets a limit on output
frequency less than the
maximum frequency (A04)
Range is 0.5 to 360.0 Hz
0.0..setting is disabled
>0.1setting is enabled
✘
0.0 Hz F-26 LIMIT H
A62 Frequency lower limit
setting
Sets a limit on output
frequency greater than zero
Range is 0.5 to 360.0 Hz
0.0..setting is disabled
>0.1setting is enabled
✘
0.0 Hz F-26 LIMIT L
A63,
A65,
A67
Jump (center)
frequency setting
Up to 3 output frequencies can
be defined for the output to
jump past to avoid motor
resonances (center frequency)
Range is 0.0 to 360.0 Hz
✘
0.0
0.0
0.0
Hz F-27 JUMP F1
JUMP F2
JUMP F3
A64,
A66,
A68
Jump (hysteresis)
frequency width
setting
Defines the distance from the
center frequency at which the
jump around occurs
Range is 0.0 to 10.0 Hz
✘
0.5
0.5
0.5
Hz F-27 JUMP W1
JUMP W2
JUMP W3
Technologies Inc.
Toll Free: voice: 1-877-539-2542 fax: 1-800-539-2542 www.mgitech.com