



















- App.27 -
Appendixes
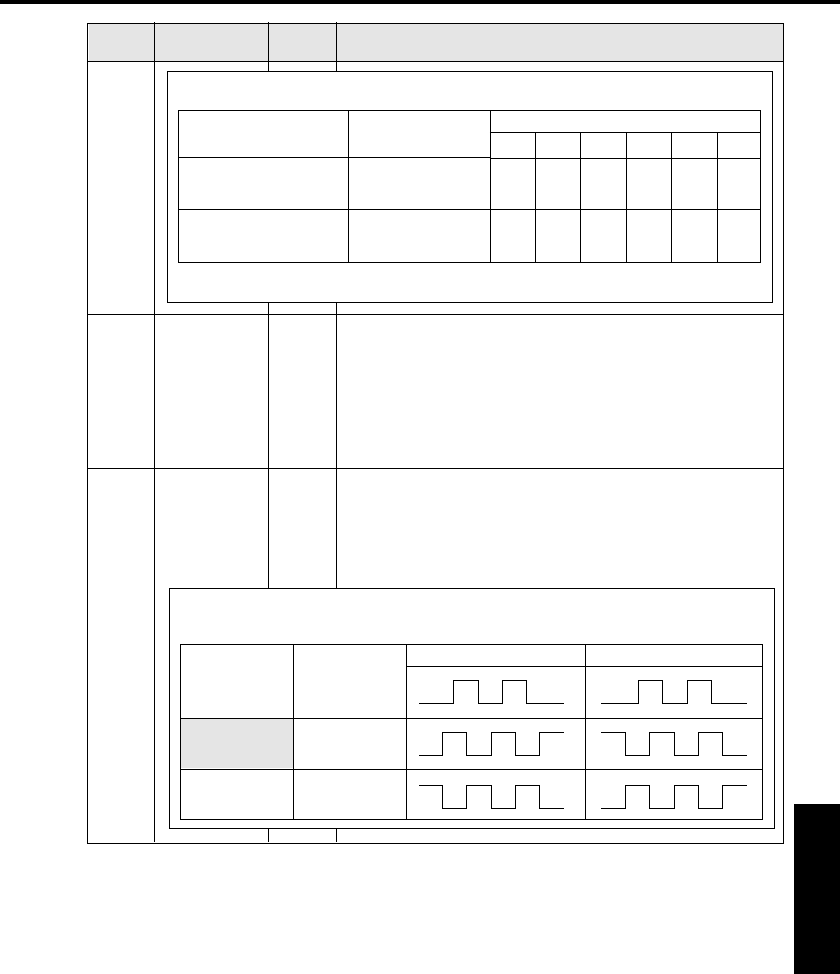
Output pulses
per single turn
Pulse output
logic inversion
You can set-up encoder pulse counts per single
turn, which is to be fed-out to the controller. Set-
ting in scalar.Set the required pulse counts per
single turn in [Pulse/rev] unit directly. Note that
the set-up of the larger counts than the encoder
pulses is disabled.
When the motor runs CW, the B-phase pulse delays
from the A-phase pulse (when the motor runs CCW,
the B-phase pulse advances the A-phase pulse).
Maximum permissible frequency and minimum required time width of command pulse inputs
Make both of the rising and tailing time 0.1 µs or shorter.
I/F for inputting
PULSE/SIGN signals
Interface for
line drivers
Interface for
open collectors
t
1
2
5
t
2
1
2.5
t
3
1
2.5
t
4
1
2.5
t
5
1
2.5
t
6
1
2.5
Maximum
permissible frequency
500kps
200kpps
Minimum required time width
[ µs ]
PrNo.
Parameter
Range Function
description
42
44
45
1 ~
16384
[2500]
0 ~ 1
(continued)
You can invert the the phase relation between A and B phases by inverting the logic of
the B-phase pulse with this parameter.
CW runCCW run
A-phase (OA),
B-phase (OB),
non-inversion
B-phase (OB),
inversion
Value
[0]
1