


















- 56 -
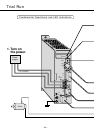
How to Adjust the Gain at Position Control Mode
1
) Input the inertia ratio of Pr20. For horizontal axis, take measurements on the basis of "Normal auto
tuning". For vertical axis, obtain values through calculations.
2) Conduct adjustments with the parameters shown in the following table taken as guidance values.
If you want to improve the response further, adjust Pr15 (Velocity Feed Forward) within the
extent that the motor (machine) does not generate abnormal sound or vibration.
• With a larger value, overshoot and/or chattering of in-position signals may occur, which results in
a longer in-position time. Note that this may be improved by adjusting the value of Pr16 (Feed
Forward Filter).
How to Adjust the Gains at Internal Velocity Control mode
1) Start the motor (machine).
2) Increase the value of Pr11 (1st Velocity Loop Gain) gradually until the motor
(machine) does not generate abnormal sound or vibration.
3) Decrease the value of Pr12 (1st velocity Loop Integration Time Constant) according to the delay of
commands.
• With a smaller value, overshoot may occur.
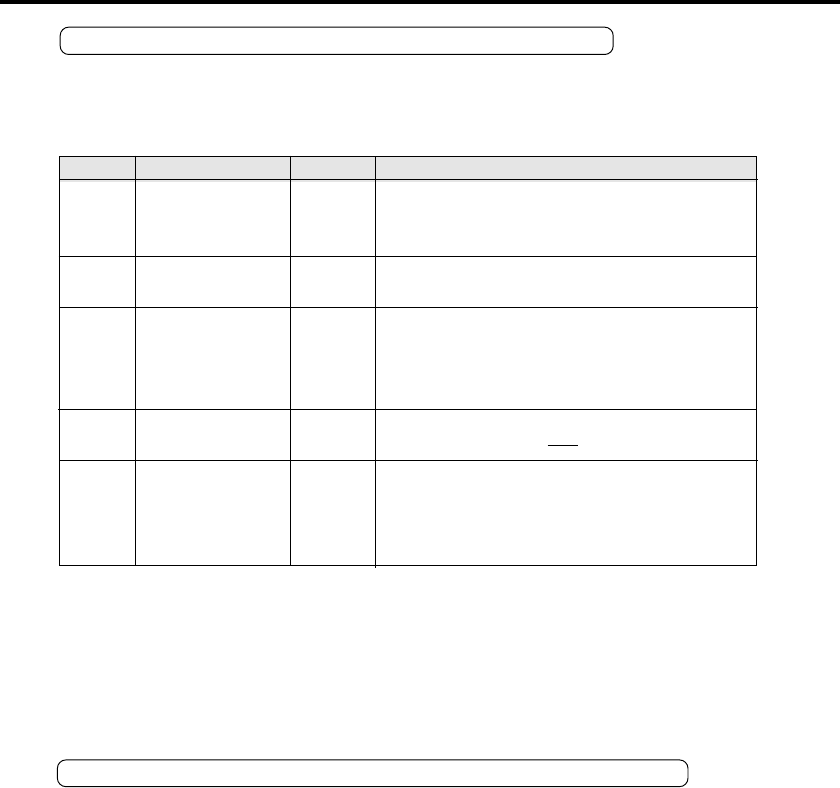
Adjustments
Concept of adjustment
OK, if there is no problem with the motion. With a larger value, responsibility
improves. With an excessively large value, oscillation occurs.
OK, if there is no unusual running noise. If unusual noise is heard, decrease
the value.
OK, if there is no problem with the motion. With a smaller value,
responsibility improves. With an excessively small value,
oscillation occurs. With a larger value, deviation pulses may not
be converged but left over indefinitely.
OK, if there is no unusual running noise. If vibration is found,
change the value. Adjust the value so that "Pr11 set-up value x
Pr14 set-up value" may be smaller than 10000. If vibration takes
place, make Pr14 larger and Pr11 smaller.
Parameter No.
Pr10
Pr11
Pr12
Pr13
Pr14
Parameter description
1st position loop gain
1st velocity loop gain
1st velocity loop
integration time constant
1st velocity detection filter
1st torque filter time
constant
Guidance value
50
30
50
0
50