



















- App.35 -
Appendixes
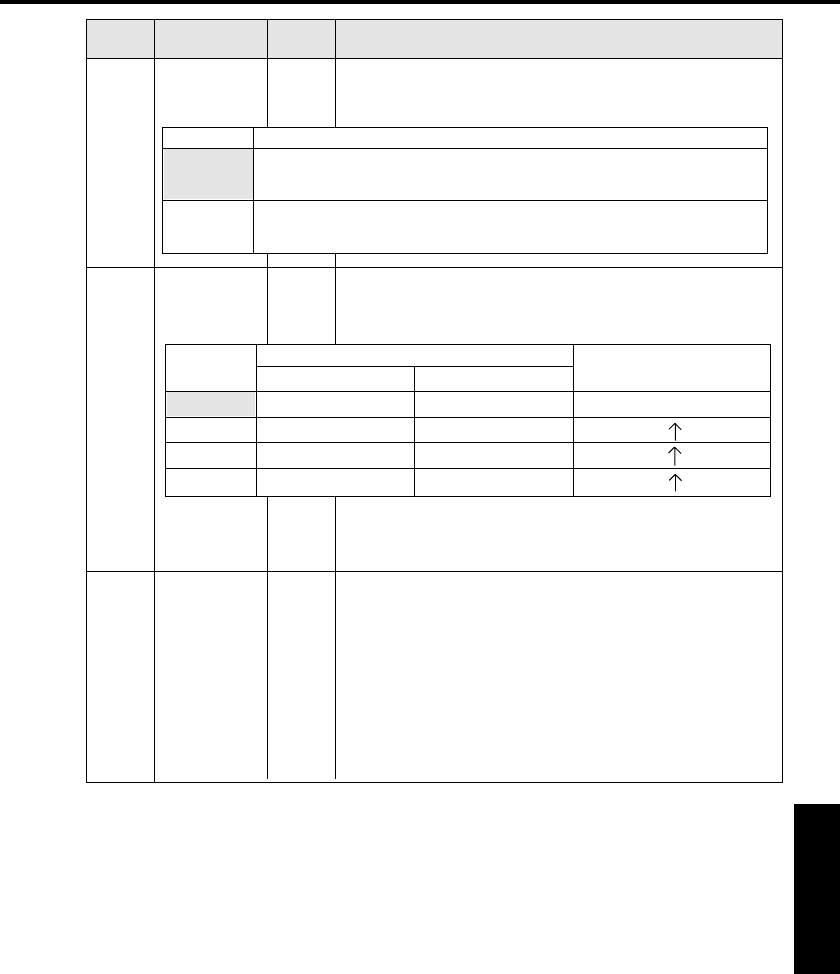
PrNo.
Parameter
Range Function
description
66
68
69
DB inhibition at
overtravel limit
Sequence
at alarm
Sequence
at servo-off
0 ~ 1
0 ~ 3
0 ~
[ 0 ]
During deceleration
DB
Free run
DB
Free run
After stop
DB
DB
Free run
Free run
Operating conditions
Position
error counter
Cleared
You can set-up the conditions for decelerating the motor
after the over-travel limit input (CCWL: CNI/F Pin 9 or CWL:
CN I/F Pin 8) is made active.
Defines the conditions for decelerating the motor and keeping
the motor stopped after one of the amplifier's protective
functions (alarms) is activated.
(DB: Dynamic brake activiated)
See also "Timing chart for alarms" in Appendix 11.
Defines the following processes after Servo-OFF (SER-ON signal:
CN I/F Pin 2).
1) Operating conditions during deceleration and after stop
2) Process for clearing the position error counter
For the relations among Pr69 values, operating conditions and process
for clearing the position error counter, see App.8ÅgDynamic brakeÅh.
See also "Timing chart for Servo-ON/OFF during the halt of motor"
in Appendix 12.
Motor operation from deceleration to and after stop
With the dynamic brake (DB) activiated the motor is stopped. After stop,
the dynamic brake is released.
Without dynamic brake the motor stops.
After stop, the motor remains free.
Value
[ 0 ]
1
Value
[ 0 ]
1
2
3