



















- App.22 -
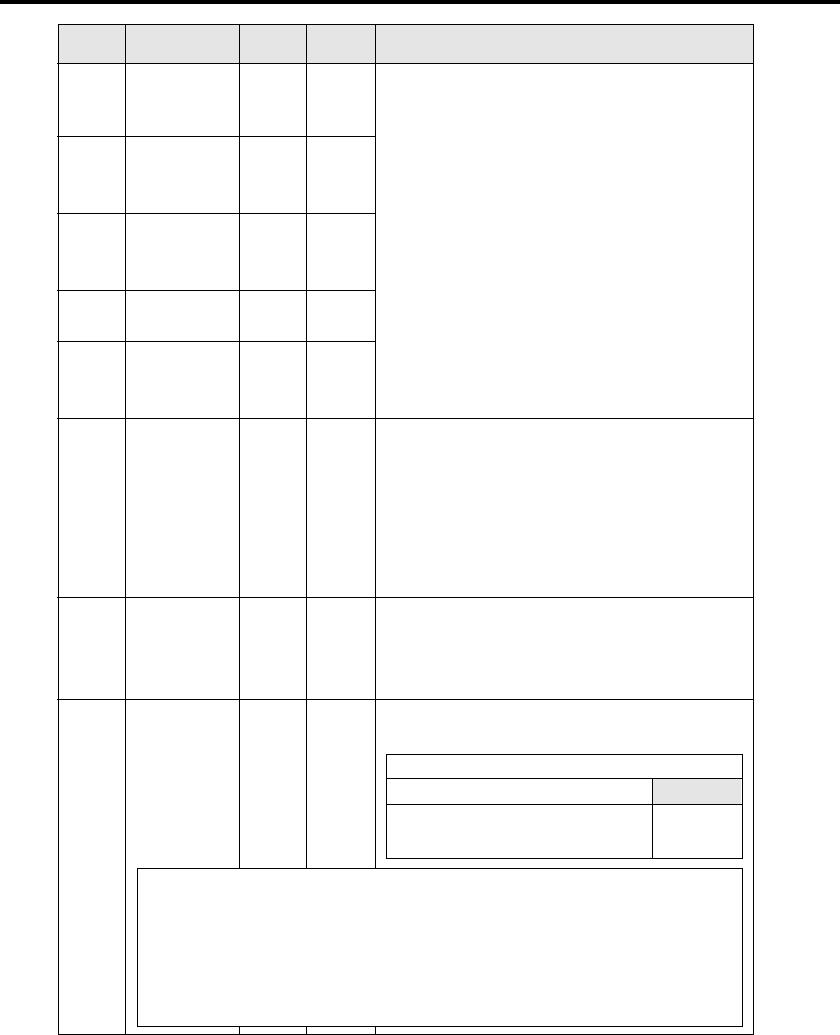
PrNo. Parameter
Value
Unit Function
• This amplifier provides 2(two) sets (1st. and
2nd.) of gain and time constant for position loop,
velocity loop, velocity detection filter and torque
command filter.
• The functions and meanings of these 2nd gains
or time constants are the same as those of the
1st ones mentioned in the previous page.
• For switching between the 1st and 2nd gains or
constants, see Adjustment.
* If Pr20 (inertia ratio) has been set correctly, the
unit of the values of Pr11 and Pr19 is Hz.
•
You can set-up the frequency of the resonance suppression notch
filter.
•
You can set-up frequency 10% lower than the resonance frequency of the
machine system which you can obtain by the frequency characteristics
analysis program contained in PANATERM ®.
•
This notch filter function will be disabled by setting this
parameter at1500.
•
You can set-up the width (five options) of the resonance
suppression notch filter in 5 steps. The higher the setting
is, the wider the width you can obtain.
•
In normal cases, the default value should be used.
•
You can set-up the time constant (eight options) of the primary delay filter
inserted in the Disturbance torque observer.
18
19
1A
1B
1C
1D
1E
1F
2nd position
loop gain
2nd velocity
loop gain
2nd velocity
loop integration
time constant
2nd speed
detection filter
2nd torque filter
time constant
Notch
frequency
Notch width
selection
Disturbance
torque
observer
0 ~
2000
[100]
1 ~
3500
[100]
1 ~
1000
[50]
0 ~ 5
[4]
0 ~
2500
[50]
100 ~
500
[1500]
0 ~ 4
[ 2 ]
0 ~ 8
1/s
Hz
*
ms
—
0.01ms
Hz
—
—
Details of Parameters
0 ~ 7
The smaller the setting is, the larger the
suppression you can expect. *1
Value of Pr1F
Disturbance torque
observer disabled.
* 1Note that the running noise of the motor becomes larger, with a smaller value of Pr1F(better suppres-
sion of the Disturbance torque). It is recommended that you start from the larger value of Pr1F to see
the actual response and decrease the value.
•
For the calculation of Disturbance torque in the observer, the inertia ratio (Pr20) is necessary. If the
load inertia is known, calculate the inertia ratio and set the value of Pr20 to the inertia ratio calcu-
lated. If the load inertia is unknown, perform the auto gain tuning so that you can automatically enter
the value of Pr20.
[ 8 ]