



















- App. 15 -
Appendixes
Homing operation (Precautions)
In the returning operation to the home position using the controller, if the initialization
signal (Z-phase signal from the encoder) is entered before the motor is not substantially
decelerated (after the proximity sensor is activated), the motor may not stop at the
required position. To avoid this, determine the positions with the proximity sensor on
and initialization signal on in consideration of the number of pulses required for
successful deceleration. The parameters for setting the acceleration/deceleration time
also affect the homing operation, so that these parameters should be determined in
consideration of both the positioning and homing operations.
As for the detail of homing operation, please refer to an operation manual of controller
you use. Following is one of examples.
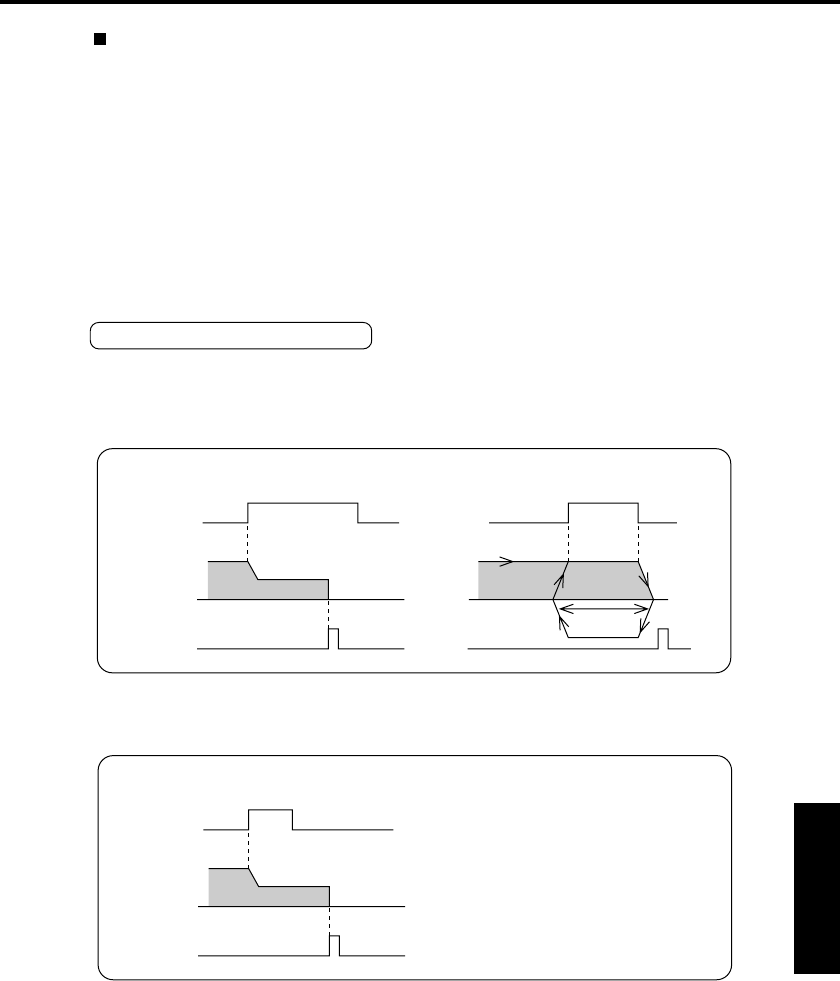
The motor will start to decelerate with the proximity sensor ON, and stop with the first
initialization signal (Z-phase).
The motor will start to decelerate with the proximity sensor ON, and stop with the first
initialization Z-phase signal after the proximity sensor OFF.
Proximity
sensor
Initialization
signal
Proximity sensor
(dog) range
Proximity sensor
(dog) range
Going back
and forth
Z-phase output from encoder
Z-phase output from encoder
Velocity
If the initial (home) position could not be found within the proximity range, the motor
will repeat deceleration and acceleration while going back and forth (stop with the
proximity sensor (dog) OFF (moving beyond the proximity range) and move in the
opposite direction).
Proximity
sensor
Initialization
signal
Proximity sensor
(dog) range
Z-phase signal from encoder
Velocity
Example of homing operation