



















- 36 -
Parameter Setting
Overview
The servo amplifier has various parameters that are used for adjusting or set-
ting the features or functions of the amplifier. This section describes the pur-
pose and functions of these parameters. Understanding these parameters is
essential for obtaining the best, application-specific operation of the amplifier.
You can view, set and adjust these parameters using your personal computer
with the communication software PANATERM
“
.
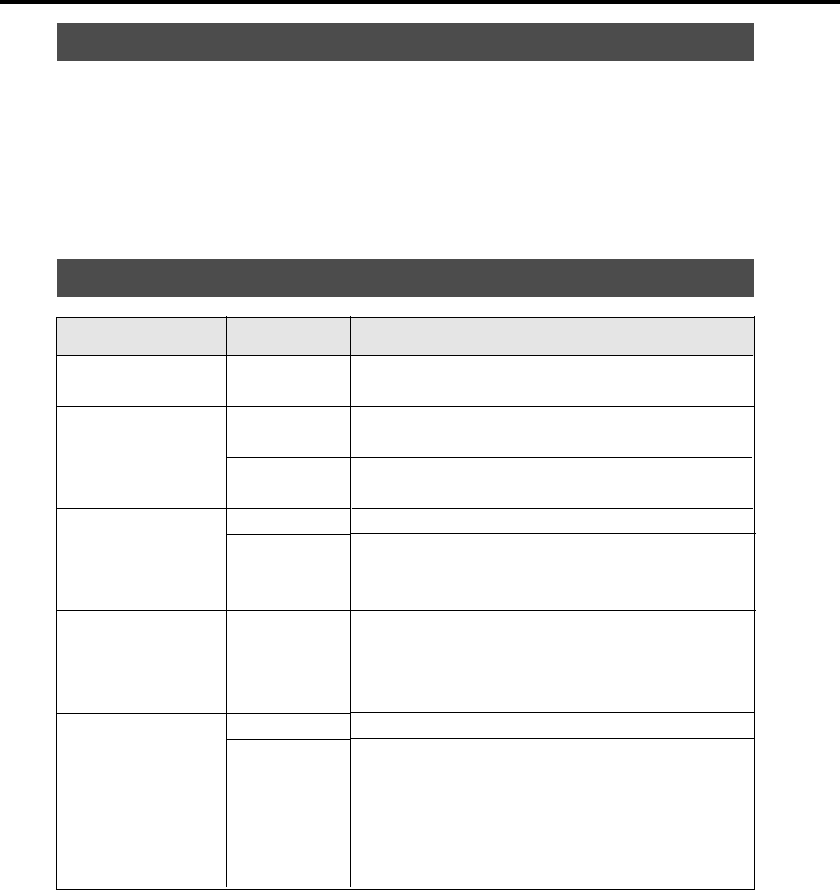
Parameter Groups and Listing
Group
ParameterNo.
Pr**
Brief explanation
Function selection
Adjustment
Position control
Internal velocity and
torque control
Sequence
00 ~ 0F
10 ~ 1F
20 ~ 22
30 ~ 35
40 ~ 4D
53 ~ 5A
5E
60 ~ 6C
For details, see "Details of Parameters" in Appendix.
<Notes>
Parameters marked with * are enabled, when set data are written to EEPROM,
main power is once turned OFF and then turned ON again.
You can select the control mode, allocate I/O signals,
and set the baud rate and etc.
You can set various factors and constants such as
the servo gains (1st and 2nd) for position, velocity
and integration, and time constants of filters.
Real time auto-tuning parameters. You can set the
real time auto-tuning mode, select the machine
stiffness, etc.
You can set the parameters relating to the switching between 1st and 2nd gains.
You can set the input format of command pulses,
logical selection, encoder pulse rate and pulse scaler.
You can set the internal speed (1st to 4th), and it's
acceleration and deceleration time.
You can set the torque limit.
You can set the conditions for detecting the output such as in-
position and zero-speed, and set the processing conditions at
excess position error, etc.
You can also set the conditions for stopping at the main power-
off, in-alarm and servo-off, or conditions for the error counter
clearance, etc.