



















Chapter 4 – Function Settings
4-3
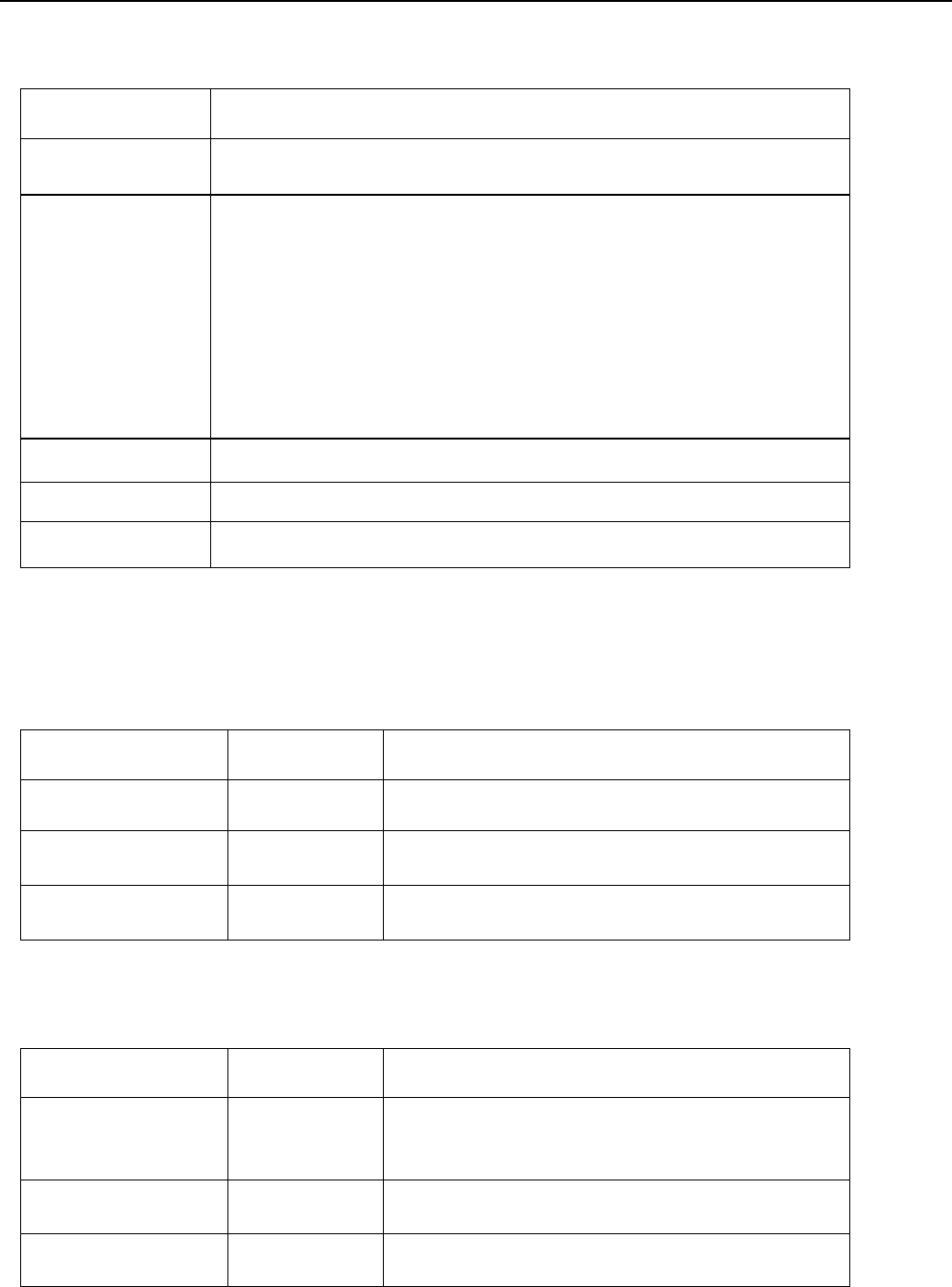
FU2-40 Description
No Motor constants calculation disabled
All
All constants can be measured in this code but different constants are tuned
according to control mode type;
For V/F, Slip compen , Sensorless_S, Sensorless_T:
(No-load current, stator resistance, leakage inductance, stator inductance
available)
Note) Only no-load current can be calculated during V/F and Slip compensation.
For Vector_SPD, Vector_T:
No-load current, stator resistance, leakage inductance, stator inductance,
encoder test, rotor filter time constant
Rs+Lsigma Calculate stator resistance, leakage inductance
Enc Test Calculate the encoder status
Tr Calculate Rotor filter time constant
6) Sensorless vector control
Set FU2-39 to 2 {Sensorless_S} or 3 {Sensorless_T} to enable Sensorless vector control. It is strongly recommended to
perform Auto-tuning for Sensorless before starting Sensorless control in order to maximize performance. Two types of
Sensorless vector control are available; Sensorless_S or Sensorless_T.
Parameter Name Code Description
Control mode selection FU2-39 Select Sensorless_S or Sensorless_T
P, I gain for sensorless
control
FU2-45, FU2-46 Setting gain for Sensorless_S control
Starting freq FU1-22 Starting freq of the motor
7) Vector control
Set FU2-39 to 4 {Vector_SPD} or 5{Vector_TRQ} to enable Vector control. Encoder should be installed to the motor with
Sub-B or Sub-D boards in the inverter to start this control.
Parameter Name Code Description
Usage of Pulse Input
Signal
EXT-12
Defines the method of pulse input with SUB-B or SUB-D
boards mounted. Vector control setting is valid only after
this parameter is set to 1 {Feed-back}.
Pulse Input Signal
Selection
EXT-15
3 types of pulse input : (A+B), A, -(A+B)
Encoder Pulse Number EXT-16 Enter the pulse number of encoder in the motor.