



















Chapter 3 Operating Principles | PCI-DMC-A01 / PCI-DMC-B01
3-78 Revised March, 2012
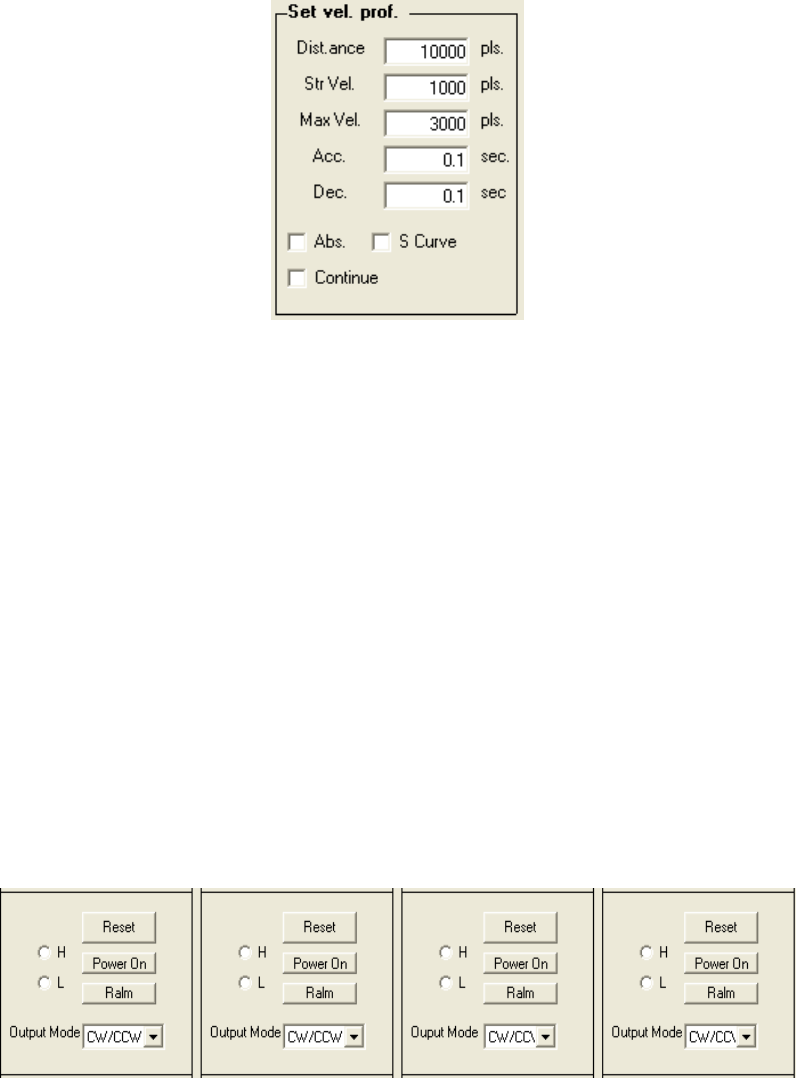
3) Enter the values of the arguments for motion control
Figure 3.106
Dist. item: Set motion distance. API function's argument variable “Distance”.
StrVel item: Starting velocity. API function's argument variable “StrVel”.
MaxVel item: Maximum velocity. API function's argument variable “MaxVel”.
Acc. item: Time required to reach maximum velocity. API function's argument
variable “acc”.
Dec item: Time required to go from maximum velocity to 0. API function's argument
variable “dec”.
Abs. Checkbox: You must check this if you want motion displacement to use
absolute coordinates.
S-Curve checkbox: You must check this box if you wish to use the S-curve velocity
curve.
Continue checkbox: Check if you wish to use the Continue motion mode.
4) Select motion mode and set motion distance.
Figure 3.107
Power On checkbox: Click Power On to turn on power to that axis.
H/L Checkbox: Select active voltage level.
Output Mode item: Output phase is either ABphase or CW/CCW.
Ralm item: Resets alarm error codes produced during operation.
Reset item: Reset Command and feedback data.