



















Chapter 3 Operating Principles | PCI-DMC-A01 / PCI-DMC-B01
3-58 Revised March, 2012
Input Node ID and check “Timer” checkbox to enable motion status display
NodeID item: API function's argument variable “NodeID”.
Timer Checkbox: Check to display the motion status. Uncheck to disable display.
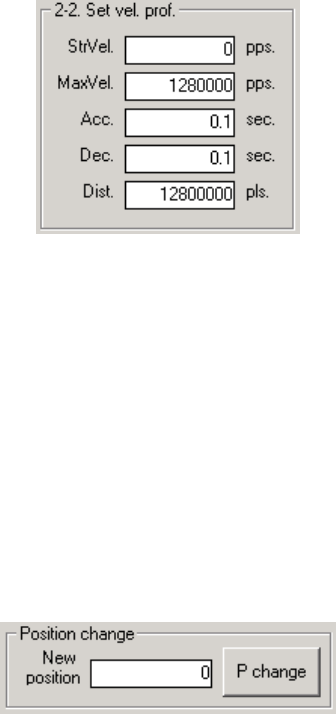
3) Enter the values of the arguments for motion control
Figure 3.85
StrVel item: Starting velocity. API function's argument variable “StrVel”.
MaxVel item: Maximum velocity. API function's argument variable “MaxVel”.
Acc. item: Time required to reach maximum velocity. API function's argument
variable “acc”.
Dec item: Time required to go from maximum velocity to 0. API function's argument
variable “dec”.
Dist. item: Set motion distance. API function's argument variable “Distance”.
4) Enter value of new position.
Figure 3.86
New Position item: Enter value of new position. API function's argument variable
“NewPos”.
5) Set Servo Motor Power ON/OFF(servo on/servo off)
Click on the “SVON” button to execute the following procedure:
rt = _DMC_01_ipo_set_svon(gDMCCardNo, NodeID, SlotID , ON_OFF);
// ON_OFF: 0 – Servo Power OFF; 1 – Servo Power ON
6) Start motion control (Using point to point motion control as an example)
Click on the “” or “” button to execute the following procedure:
rt = _DMC_01_start_ta_move(gDMCCardNo, NodeID, SlotID, Distance, StrVel,
MaxVel, acc, dec); // Motion displacement using absolute coordinates with T-curve
velocity cross-section