



















Chapter 3 Operating Principles | PCI-DMC-A01 / PCI-DMC-B01
Revised March, 2012 3-39
rt = _DMC_01_motion_status(gDMCCardNo, NodeID, SlotID, &MC_status);
// Get current status
rt = _DMC_01_motion_done(gDMCCardNo, NodeID, SlotID, &MC_done);
// Get current motor status
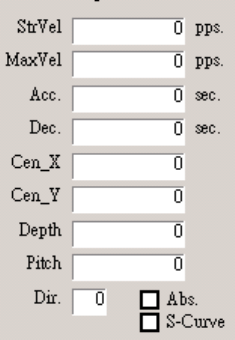
3) Enter the argument values and chosen velocity cross-section for motion control
Figure 3.56
StrVel item: Starting velocity. API function's argument variable “StrVel”.
MaxVel item: Maximum velocity. API function's argument variable “MaxVel”.
Acc. item: Time required to reach maximum velocity. API function's argument
variable “acc”.
Dec item: Time required to go from maximum velocity to 0. API function's argument
variable “dec”.
Cen_X item: Center's x-coordinate. API function's argument variable “helix_cen_x”.
Cen_Y item: Center's y-coordinate. API function's argument variable “helix_cen_y”.
Depth item: Total distance of 3rd axis. (See Fig. 3.55).
Pitch item: Distance in the 3rd axis when one revolution is completed in axis-1 and
axis-2.
Dir item: The direction of the arc path in axis-1 and axis-2 (0: Clockwise; 1:
Counterclockwise).
Abs. Checkbox: You must check this if you want motion displacement to use
absolute coordinates.
S-Curve checkbox: You must check this box if you wish to use the S-curve velocity
curve.