



















Chapter 21 3-Axis Linear Interpolation Motion Control API | PCI-DMC-A01 / PCI-DMC-B01
Revised March, 2012 21-3
21.2 _DMC_01_start_sr_move_xyz
FORMAT
I16 PASCAL _DMC_01_start_sr_move_xyz(U16 CardNo, U16* NodeID,U16* SlotID, I32 DisX,
I32 DisY, I32 DisZ, I32 StrVel, I32 MaxVel, F64 Tacc, F64 Tdec)
Purpose
3-axis linear interpolation motion using relative coordinates with S-curve velocity
cross-section.
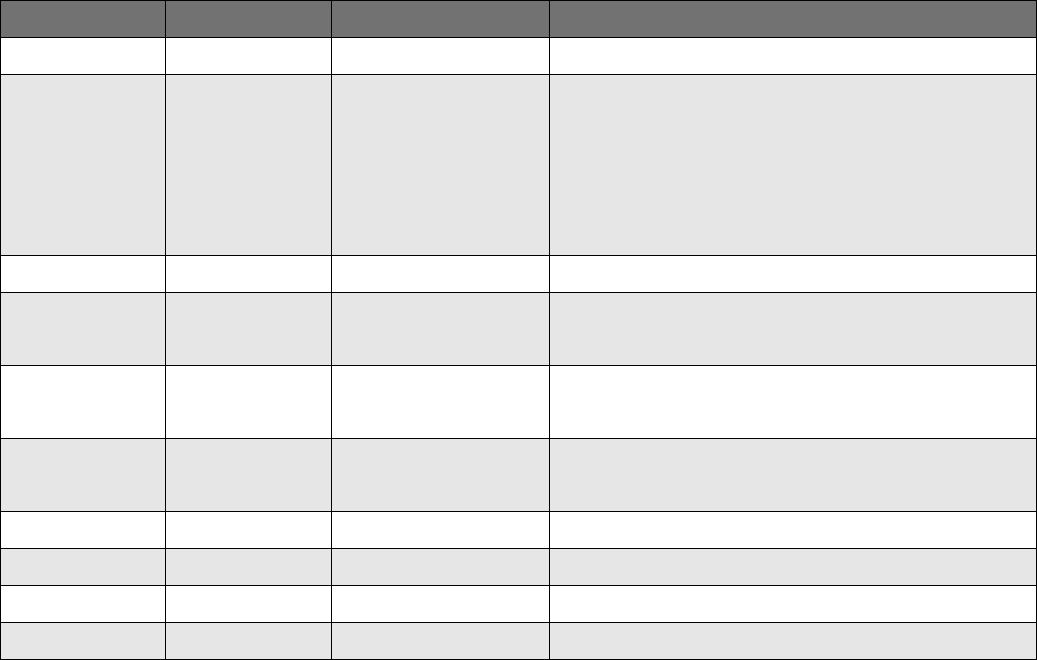
Parameters
Name Data Type Unit Description
CardNo U16 Number Unit CardNo is between 0~15
NodeIDArray U16* Number Unit
Holds Node ID sets used for linear
interpolation
NodeIDArray[0] = Node_1
NodeIDArray[1] = Node_2
NodeIDArray[2] = Node_3
SlotID U16* Number Unit Slot ID
DisX I32 Number of pulses
Relative path parameter for motion of Node
ID on X-axis
DisY I32 Number of pulses
Relative path parameter for motion of Node
ID on Y-axis
DisZ I32 Number of pulses
Relative path parameter for motion of Node
ID on Z-axis
StrVel I32 Pulses per second Starting velocity parameter
MaxVel I32 Pulses per second Maximum velocity parameter
Tacc F64 Second Specified acceleration time
Tdec F64 Second Specified deceleration time
Example
U16 CardNo=0;
U16 NodeIDArray[3]={1,2,3};
U16 SlotID[3]={0, 0, 0};
I32 DisX =25000, DisY =50000 , DisZ =75000 ;
I32 StrVel=0, MaxVel=50000;
F64 Tacc=0.1. Tdec=0.1;
I16 status= _DMC_01_start_sr_move_xyz (CardNo, NodeIDArray, SlotID, DisX, DisY, DisZ,
StrVel, MaxVel, Tacc, Tdec);