Altivar
®
58 TRX AC Drives
Type H Specifications
© 2000–2003 Schneider Electric All Rights Reserved
116
09/2003
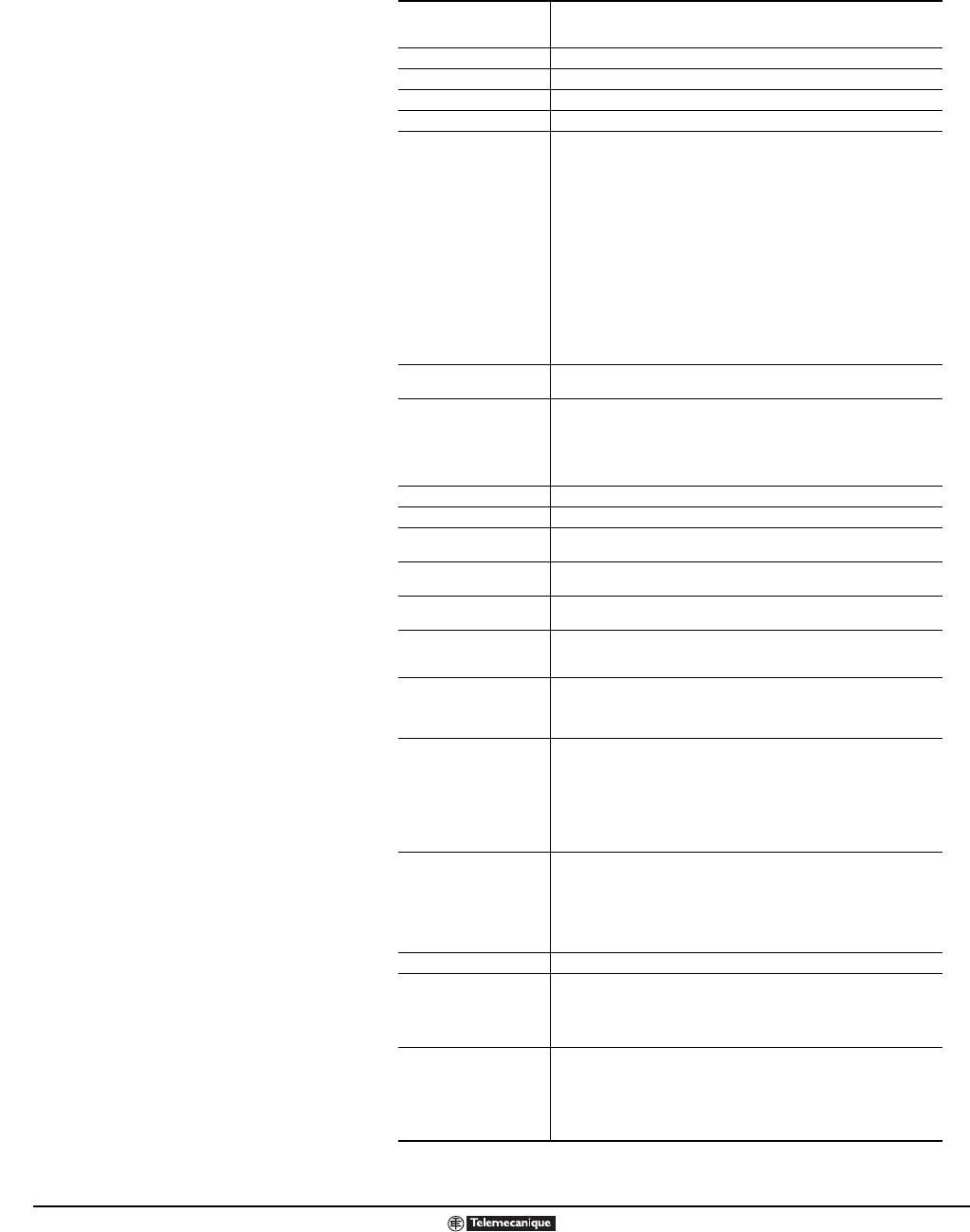
Electrical Specifications
Input voltage
[1]
208 V -15% to 230 V +15% single-phase input
208 V -15% to 230 V +15% three-phase input
400 V -15% to 460 V + 20% three-phase input
[2]
Input frequency 50/60 Hz ±5%
Output voltage Three-phase output, maximum voltage equal to input voltage
Galvanic isolation Galvanic isolation between power and control (inputs, outputs, supplies)
Output frequency 0.1 to 60 Hz (configurable to 500 Hz with programming options)
[3]
Switching frequency 4 kHz, configurable with programming accessories
[3]
ATV58HU09M2–D12M2 and ATV58HU18N4–D23N4:
0.5 - 1 - 2 - 4 - 8 kHz without derating
12 - 16 kHz with derating of one hp rating in steady state
12 - 16 kHz without derating and with reduced duty cycle
[4]
ATV58HD16M2–D23M2 and ATV58HD28N4–D46N4:
0.5 - 1 - 2 - 4 - 8 kHz without derating
8 - 12 kHz with derating of one hp rating in steady state
8 - 12 kHz without derating and with reduced duty cycle
[4]
ATV58HD28M2–D46M2 and ATV58HD54N4–D79N4:
0.5 - 1 - 2 - 4 kHz without derating
8 kHz with derating of one hp rating in steady state
4 - 8 kHz without derating and with reduced duty cycle
[4]
ATV58HC10N4X–C33N4X:
0.5 - 1- 2 kHz without derating
4 kHz without derating and with reduced duty cycle
[4]
4 kHz with derating of one hp rating in steady state
Speed range 1:100 open loop (for example 0.6 Hz to 60 Hz)
1:10 open loop for ATV58HC10N4X–C33N4X
Speed regulation 1% of rated motor speed without adjustments or feedback.
±0.1% of rated motor speed with optional analog I/O card and appropriate
tachometer feedback.
[3]
±0.02% of rated motor speed with optional digital I/O card and appropriate
encoder feedback.
[3]
3% for ATV58HC10N4X–C33N4X
Efficiency 97% at full load typical.
Displacement power factor 98% through speed range.
Motor control algorithm Sensorless flux vector control with a pulse width modulated (PWM) output
wave form.
DC injection braking Automatically on stopping as soon as frequency drops below
0.1 Hz for 0.5 seconds.
Braking torque 30% of nominal motor torque without dynamic braking (typical value). Up to
150% with the dynamic braking option (for constant torque ratings).
Transient output current 160% of nominal NEC rated motor current for 60 seconds (for constant torque
ratings).
110% of nominal motor current for 60 seconds (for variable torque ratings).
Transient motor torque 200% of nominal motor torque (typical value at ±10%) for 2 seconds (for
constant torque ratings).
170% of nominal motor torque (typical value at ±10%) for 60 seconds (for
constant torque ratings).
Drive controller protection Protection against short circuits:
• between output phases
• between output phases and ground
• on outputs of internal supplies
Thermal protection against overheating and overcurrent.
Undervoltage and overvoltage faults.
Protection against single-phase input operation on the three-phase drive
controllers.
Motor protection Thermal protection integrated in the drive controller by continuous calculation
of I
2
t, taking motor speed into account.
[5]
Motor thermal state is retained during loss of power.
Motor thermal protection can be modified with a programming option to
correspond to the type of motor cooling.
[3]
Protection against motor phase loss.
Protection by motor thermal sensors with analog option card.
[3]
Electrical isolation Electrical isolation between power and control (inputs, outputs, supplies).
Available internal supplies Protected against short-circuits and overloads.
1 (+) 10 V ±1% supply for the reference potentiometer (1–10 kΩ), maximum
current 10 mA.
1 (+) 24 V supply (min. 20 V, max. 30 V) for control inputs, maximum current
200 mA.
Analog inputs AI 1 analog voltage input AI1: range 0-10 V, impedance 30 kΩ.
1 analog current input AI2: range 0-20 mA, impedance 100 Ω.
(reassignable to x-y mA by programming x and y, with a definition of 0.1 mA).
Frequency resolution in analog reference: 0.1 Hz for 100 Hz (10 bits).
Accuracy: ± 1%, linearity ±0.5% of the maximum output frequency.
Sampling time: 2 ms maximum.
[1] The maximum allowable input line unbalance is
5% for 460 V input line short circuit capacity of
15,000 A, 2.5% for 460 V input line short circuit
capacity of 30,000 A, 0.5% for 460 V input line short
circuit capacity of 65,000 A. If the resulting voltage
harmonic distortion exceeds 5%, three phase line
reactors are recommended.
[2] Input voltage is 460 V, -10%, +15% on
ATV58HU54N4X–D23N4X controllers as rated in the
table on page 9. Input voltage is 400 V -15% to 460 V
+10% on ATV58C10N4X–C33N4X.
[3] See page 26 and following for available accessories
and options.
[4] The drive controller can be configured to reduce
switching frequency if the drive thermal state reaches
95%. When the drive thermal state returns to 70%, the
switching frequency returns to the set value. If the duty
cycle (drive controller run time) does not exceed 60%
(36 second maximum for a 60 second cycle) derating is
not required.
[5] Motor thermal protection can be set between 25
and 136% of the drive controller rating.









































































































































































































































