



















Altivar
®
58 TRX AC Drives
Drive and Motor Configuration Parameters
47
09/2003
© 2000–2003 Schneider Electric All Rights Reserved
A higher switching frequency will produce a waveform with less harmonic distortion and allow the current
regulator in the drive controller to perform better. Cable lengths greater than 330 feet (100 m) may
require adjusting the switching frequency to lower settings to reduce the transmission line phenomena
that tends to develop in long conductors.
Motor Noise Reduction
When this parameter is enabled, the switching frequency is randomly modulated to avoid audible
resonance from the motor. This parameter is useful in applications where audible motor noise is
undesirable.
Energy Economizer
This function is enabled when the Variable Torque macro-configuration is selected. When this parameter
is enabled, the drive controller optimizes the motor efficiency by automatically adjusting the volts/hertz
ratio. The drive controller accelerates the load with a constant volts/hertz ratio. When the reference
speed is attained, the drive controller begins lowering the voltage applied until the current begins to rise.
It operates at this point until the speed reference is changed. This parameter is useful for saving energy
in all variable torque applications.
Volts/Hertz Adjustment
This function is available in variable torque mode and if the Energy Economizer function is disabled. This
parameter is useful in applications where the user wishes to define the volts/hertz profile manually
instead of having the drive controller perform this function with the Energy Economizer function.
The factory default is set to 20%, with an adjustment range of 0 to 100%.
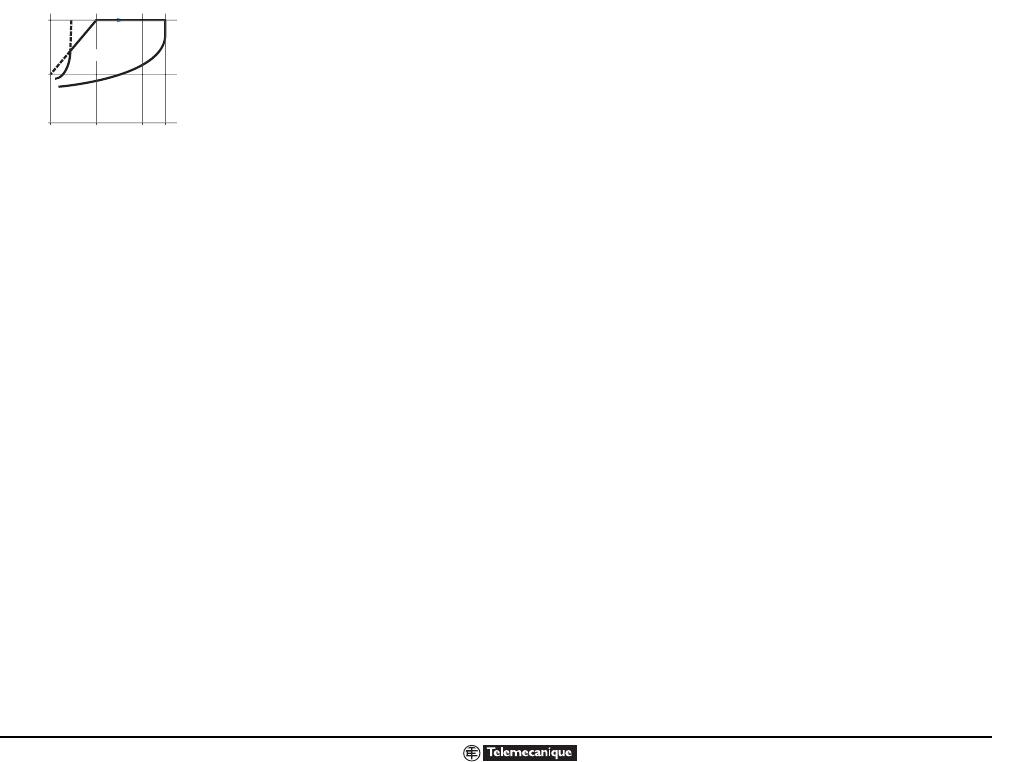
Current Limit Adaptation
This function is available in variable torque mode, and provides for the automatic adaptation of the
current limit according to the speed to avoid a motor overload fault. It is used in applications involving
fans where the load curve of the fan changes with the air density, as shown in the graph to the left.
Special Motor Adaptation
This parameter should be enabled when using special motors such as synchronous permanent magnet
motors, synchronous wound field motors, or synchronous reluctance motors. This parameter should
also be enabled when one drive is used to control multiple motors in parallel. See the Thermal Protection
of Motor below for more information. Enabling this parameter increases the IR compensation adjustment
range from 0 to 800%. This parameter can also be used in testing when a very small motor is used only
to verify proper operation of a drive system wiring and control.
0
0
.
5
1
I
li
m
it
C
old
a
i
r
H
o
t
a
i
r
1
00
%
C
L
I
50
%
C
L
I
H
SP
f
/
f
n
F
anLoad.e
p
s
Current Limit
Adaptation Curves