



















Altivar
®
58 TRX AC Drives
Adjustment Parameters
43
09/2003
© 2000–2003 Schneider Electric All Rights Reserved
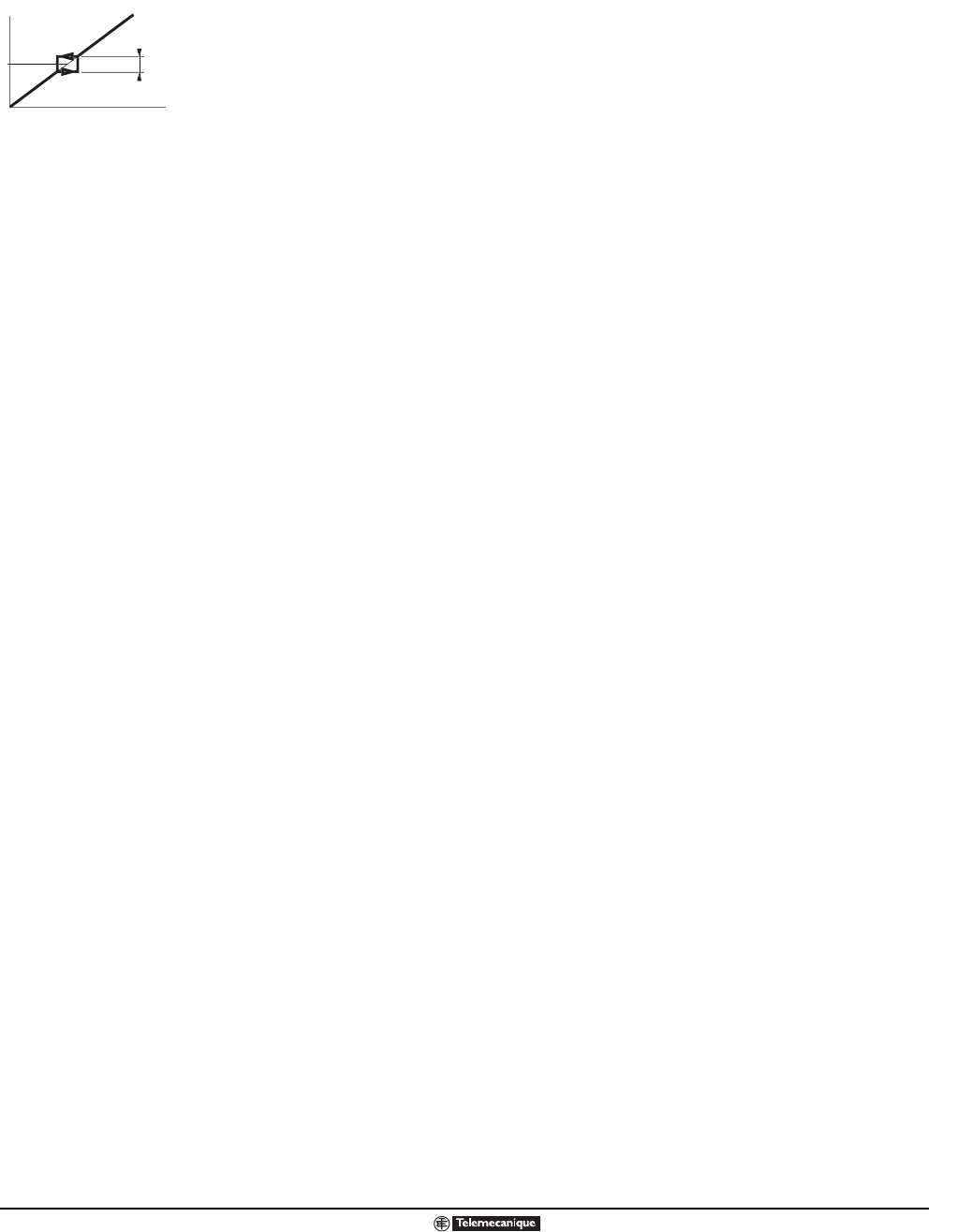
Skip Frequency
This parameter, also referred to as jump frequency, allows suppression of a critical speed which causes
mechanical resonance phenomena. Prolonged operation of the motor within a frequency band of 5 Hz
is prohibited. The frequency band is adjustable over the speed range. A representation of this is shown
to the left. There are three skip frequency settings.
This function is useful for applications involving light-weight machines, such as bulk product conveyors,
with unbalanced motors. It is also useful for applications involving fans and centrifugal pumps.
Low Speed Run Time Limit
This function, also referred to as a sleep function, is used to stop the motor after running at low speed
for a programmed amount of time, with the run command present and zero speed reference. The length
of run time at low speed is adjustable from 0.1 to 999.9 seconds. The factory setting is 0 s, which
disables this function. The motor will re-start if the frequency reference becomes greater than the low
speed or the run command is cycled.
This function can be used for automatic starting and stopping of pressure-regulated pumps.
IR Compensation
This parameter is used to adjust low-speed torque for optimal performance. Adjust this parameter to
compensate for the resistive voltage drop of the motor stator windings and the conductors connecting
the motor and drive controller.
The factory setting is 100%, with a range of 0 to 150%. (If using special motors such as synchronous
permanent magnet motors, synchronous wound field motors, or synchronous reluctance motors, the
adjustment range can be expanded and is 0 to 800%.)
This parameter is typically used to boost torque performance during low speed operation. If an auto-
tune is performed, adjustment of this parameter is usually not required.
Slip Compensation
This parameter is used to adjust the slip compensation to improve speed regulation.The factory setting
is 100%, with a range of 0 to 150%.
Induction motors develop torque based on the slip, which is the difference between the speed of the
rotating magnetic field in the stator and the speed of the rotor. As the load increases, the slip increases
to produce the necessary torque. In applications where the change in speed due to slip is undesirable,
the slip compensation should be increased. When this parameter is increased, the drive controller will
automatically increase the output frequency. The amount of increase is proportional to the increase of
the load, allowing one setting for the entire speed range.
Gain
This parameter allows adjustment of the drive controller’s response time to sudden changes in the motor
load. The factory setting is 20%, with a range of 0 to 100%.
Decreasing the gain parameter slows the response time of the drive. Increasing the gain parameter
makes the drive respond more quickly. This parameter should be increased when it is not desirable for
motor speed to change as the motor load changes, such as in applications that have fast cycle times or
high torque requirements.
Stability
This parameter allows adjustment of speed overshoot of the drive controller to sudden changes in the
motor load. The factory setting is 20%, with a range of 0 to 100%.
Increasing the stability setting dampens the overshoot. This parameter should be adjusted with the gain
setting to tune the drive response to meet desired performance on applications that have fast cycle times
or high torque requirements.
f
(
Hz
)
R
e
f
e
r
e
n
ce
5
H
z
S
ki
p
Fre
q
.e
p
s
Skip Frequency
Diagram