



















Chapter 3 Operating Principles | PCI-DMC-A01 / PCI-DMC-B01
Revised March, 2012 3-9
3.4 Homing Motion Control
3.4.1 Overview
Most application programs use an incremental encoder to retrieve position feedback. A
homing operation is essential to performing accurate motion control. After the power is
switched on, the status of the machine bench's position can be in one of three
states. First, position is stopped at the homing position awaiting the next command;
second, position is stopped at the ORG sensor; third, position is stopped somewhere
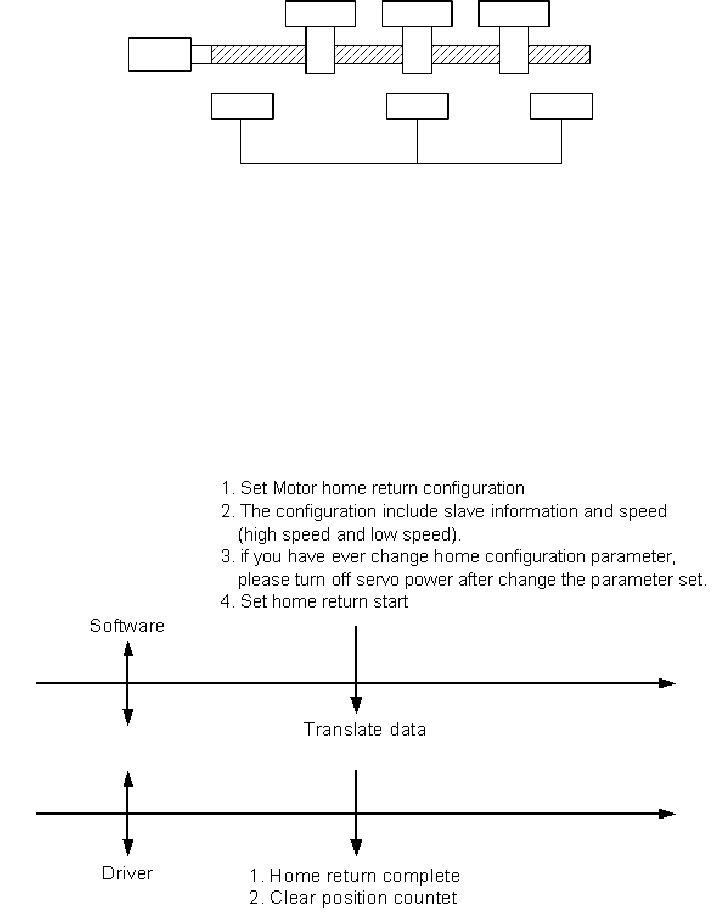
between ORG and Limit Switch (PEL and MEL). Please refer to the block diagram
in Fig. 3.15 below.
M
1 2 13
PEL ORG MEL
Figure 3.15
PCI-DMC-A01 provides different functions for each of the above conditions. For homing
mode in a normal position, PCI-DMC-A01 offers up to 35 different reset to home
functions (including the reserved part). The user can simply use software settings to
have the hardware perform the user-selected homing operation. Once the homing
motion is complete, the corresponding command and feedback position will be cleared
to 0. The target position will however not be cleared to 0. The following graph shows the
conditions for executing homing:
Figure 3.16