



















Chapter 3 Operating Principles | PCI-DMC-A01 / PCI-DMC-B01
3-52 Revised March, 2012
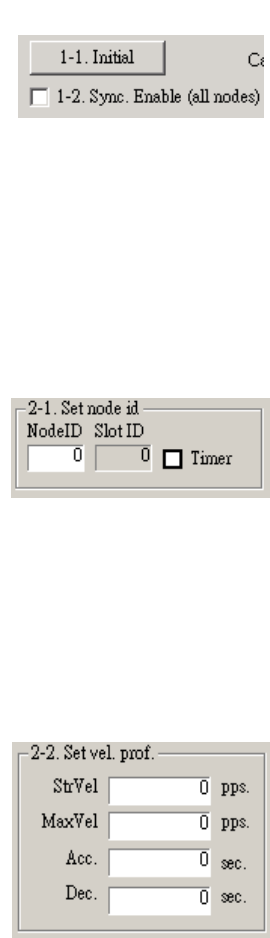
2) Choose whether to enable synchronization motion control
Figure 3.75
Sync. Enable checkbox: Enable motor sync or not.
You can execute the following procedure to enable sync motion:
rt = _DMC_01_sync_move_config(gDMCCardNo, gpNodeID[i], SlotID, enable);
// If enable argument is 1, then synchronized motion control is enabled.
3) Set Servo Node ID and enable motion status display
Figure 3.76
Input Node ID and check “Timer” checkbox to enable motion status display
NodeID item: API function's argument variable “NodeID”.
Timer Checkbox: Check to display the motion status. Uncheck to disable display.
4) Enter the values of the arguments for motion control
Figure 3.77
StrVel item: Starting velocity. API function's argument variable “StrVel”.
MaxVel item: Maximum velocity. API function's argument variable “MaxVel”.
Acc. item: Time required to reach maximum velocity. API function's argument
variable “acc”.
Dec item: Time required to go from maximum velocity to 0. API function's argument
variable “dec”.