



















Chapter 3 Operating Principles | PCI-DMC-A01 / PCI-DMC-B01
3-20 Revised March, 2012
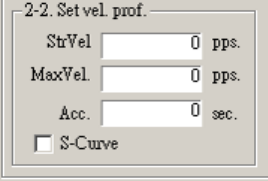
3) Enter the values of the arguments for motion control
Figure 3.31
StrVel item: Starting velocity. API function's argument variable “StrVel”.
MaxVel item: Maximum velocity. API function's argument variable “MaxVel”.
Acc. item: Time required to reach maximum velocity. API function's argument
variable “acc”.
S-Curve checkbox: You must check this box if you wish to use the S-curve velocity
curve.
4) Set Servo Motor Power ON/OFF(servo on/servo off)
Click on the “SVON” button to execute the following procedure:
rt = _DMC_01_ipo_set_svon(gDMCCardNo, NodeID, SlotID , ON_OFF);
// ON_OFF: 0 – Servo Power OFF; 1 – Servo Power ON
5) Start velocity motion control
Click on the “” or ““ button to execute the following procedure:
/* S-curve velocity curve */
rt = _DMC_01_sv_move(gDMCCardNo, NodeID, SlotID, StrVel, MaxVel, acc, 0);
/* T-curve velocity curve */
rt = _DMC_01_tv_move(gDMCCardNo, NodeID, SlotID, StrVel, MaxVel, acc, 0);
6) Stop motion
Hit the “STOP” button to execute an emergency stop:
rt = _DMC_01_emg_stop (gDMCCardNo, NodeID, SlotID);
In this example, emergency stop is used to stop motion. This method quickly stops
motion by setting deceleration time to 0. For more information about the Stop Motion
function, refer to the later section on “Stop Motion Control API”.
7) Exit procedure
Click on the “Exit” button to quit and exit the procedure.
“_DMC_01_reset_card” and “_DMC_01_close” must be executed to exit this
function. Please refer to Section 3.12 “Exit procedure” for the function operations.