



















Chapter 3 Operating Principles | PCI-DMC-A01 / PCI-DMC-B01
Revised March, 2012 3-61
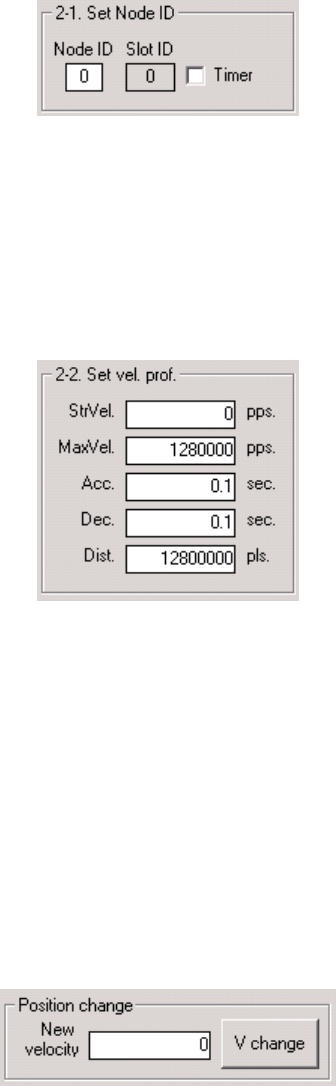
2) Set Servo Node ID and enable motion status display
Figure 3.88
Input Node ID and check “Timer” checkbox to enable motion status display
NodeID item: API function's argument variable “NodeID”.
Timer Checkbox: Check to display the motion status. Uncheck to disable display.
3) Enter the values of the arguments for motion control
Figure 3.89
StrVel item: Starting velocity. API function's argument variable “StrVel”.
MaxVel item: Maximum velocity. API function's argument variable “MaxVel”.
Acc. item: Time required to reach maximum velocity. API function's argument
variable “acc”.
Dec item: Time required to go from maximum velocity to 0. API function's argument
variable “dec”.
Dist. item: Set motion distance. API function's argument variable “Distance”.
2) Enter value of new velocity
Figure 3.90
New Velocity item: Enter value of new velocity. API function's argument variable
“NewSpeed”.