



















Chapter 3 Operating Principles | PCI-DMC-A01 / PCI-DMC-B01
Revised March, 2012 3-71
Input Node ID and check “Timer” checkbox to enable motion status display
NodeID item: API function's argument variable “NodeID”.
Timer Checkbox: Check to display the motion status. Uncheck to disable display.
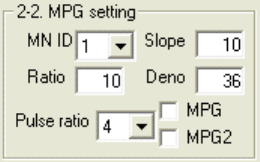
3) Enter parameter value of manual pulse control.
Figure 3.100
MN ID item: API function's argument variable “MNNodeID”.
Ratio item: Ratio between each MPG rotation and motor rotation. API function's
argument variable “ratio”.
Slope item: MPG speed slope. API function's argument variable “slope“.
Deno item: Denominator for motor rotations per MPG revolution. API function's
argument variable denominator”.
Pulse ratio item: Ratio of pulses per MPG revolution. API function's argument
variable “pulse_ratio”.
4) Set Servo Motor Power ON/OFF(servo on/servo off)
Click on the “SVON” button to execute the following procedure:
rt = _DMC_01_ipo_set_svon(gDMCCardNo, NodeID, SlotID , ON_OFF);
// ON_OFF: 0 – Servo Power OFF; 1 – Servo Power ON
5) If you wish to execute “Manual Motion Control 1”, you must check the “MPG”
checkbox and execute the following procedure:
rt = _DMC_01_get_rm_input_value(CardNo, NodeID, SlotID, Port, &Value);
// Retrieve the value for bit 0 to bit 15 of the remote I/O module's input port
rt = _DMC_01_set_rm_mpg_axes_enable(CardNo, MasterNodeID, MasterSlotID,
NodeID, SlotID, enable, pulser_ratio, ratio, slope); // Manual motion control 1
If you wish to execute “Manual Motion Control 2”, you must check the “MPG2”
checkbox and execute the following procedure:
rt = _DMC_01_set_rm_mpg_axes_enable2(CardNo, MasterNodeID, MasterSlotID,
NodeID, SlotID, enable, pulser_ratio, ratio, slope, denominator);
// Manual motion control 2. ratio is the numerator for motor rotations per revolution;
denominator is the denominator for motor rotations per revolution; These two
parameters can be used to customize the MPG outputs.