Chapter 4 Parameters|
4-136 Revision June 2008, 04EE, SW--PW V1.11/CTL V2.11
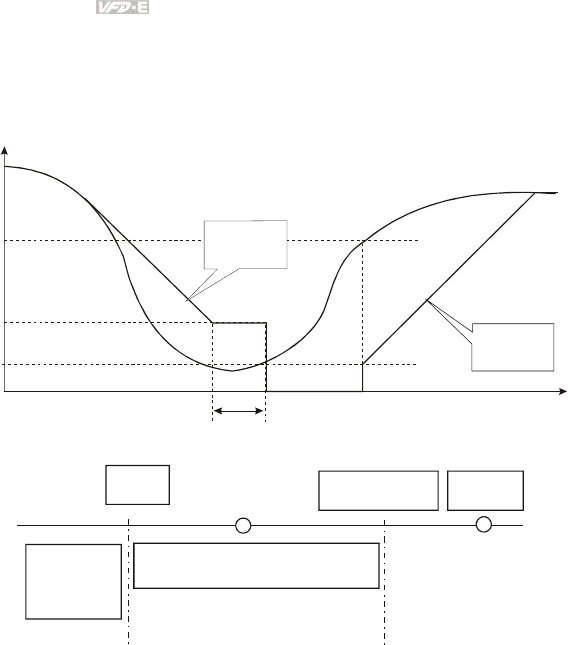
When the AC motor drive is in sleep mode, frequency command is still calculated by PID.
When frequency reaches wake up frequency, AC motor drive will accelerate from Pr.01.05
minimum frequency following the V/f curve.
The wake up frequency must be higher than sleep frequency.
10.16
10.15
01.05
10.14
Frequency
The limit of
decel. time
frequency calculated by PID
output
frequency
Time
The limit of
accel. time
Fmin
Fsleep
Fcmd=0
Fout = 0
lower bound
of frequency
Fmin<Fsleep<
lower bound
of frequency
When output frequency
≤
sleep frequency and time > detection time, it will go in sleep mode.
When min. output frequency ≦ PID frequency ≦ lower bound of frequency and sleep function
is enabled (output frequency
sleep frequency and time > detection time), frequency will be 0
(in sleep mode). If sleep function is disabled, frequency command = lower bound frequency.
When PID frequency < min. output frequency and sleep function is enabled (output frequency
≤
sleep frequency and time > detection time), output frequency =0 (in sleep mode).
If output frequency
≤
sleep frequency but time < detection time, frequency command = lower
frequency. If sleep function is disabled, output frequency =0.












































































































































































































































































































































































