



















124
Homing Operation
Homing Offset Operation
The home offset at the completion of homing can be specified by 32.Pr00 (Home offset). Specify the travel
from a machine home position (homing completion position) to the “0” position as the home offset.
• 16.Pr37 (Home complete type) is set to “0”
The motor stops at the machine home position when the homing has completed and, at the same time, a
command position is set to [- home offset].
• 16.Pr37 (Home complete type) is set to “1”
After the motor stops at a machine home position, preset a command position = [- home offset]. Then,
perform a step operation for the home offset at a speed specified by 16.Pr32 (Homing offset speed). In this
case, the command position after the home offset operation completes becomes “0”
Caution
1) If 16.Pr32 (Homing offset speed), 16.Pr33 (Homing acceleration setting) and 16.Pr34 (Homing decelera-
tion setting) are “0”, an operation trips due to the error code No. 69 (undefined data error protection) and
stops according to an operation at alarm occurrence.
2) Do not set [- home offset] out of a maximum travel limit range. The error code No. 72 (maximum travel limit
error protection) may be shown.
3) Set the home offset appropriately so that a position of [command position = 0] is not in the over-travel
inhibit input range. The home offset may not be completed.
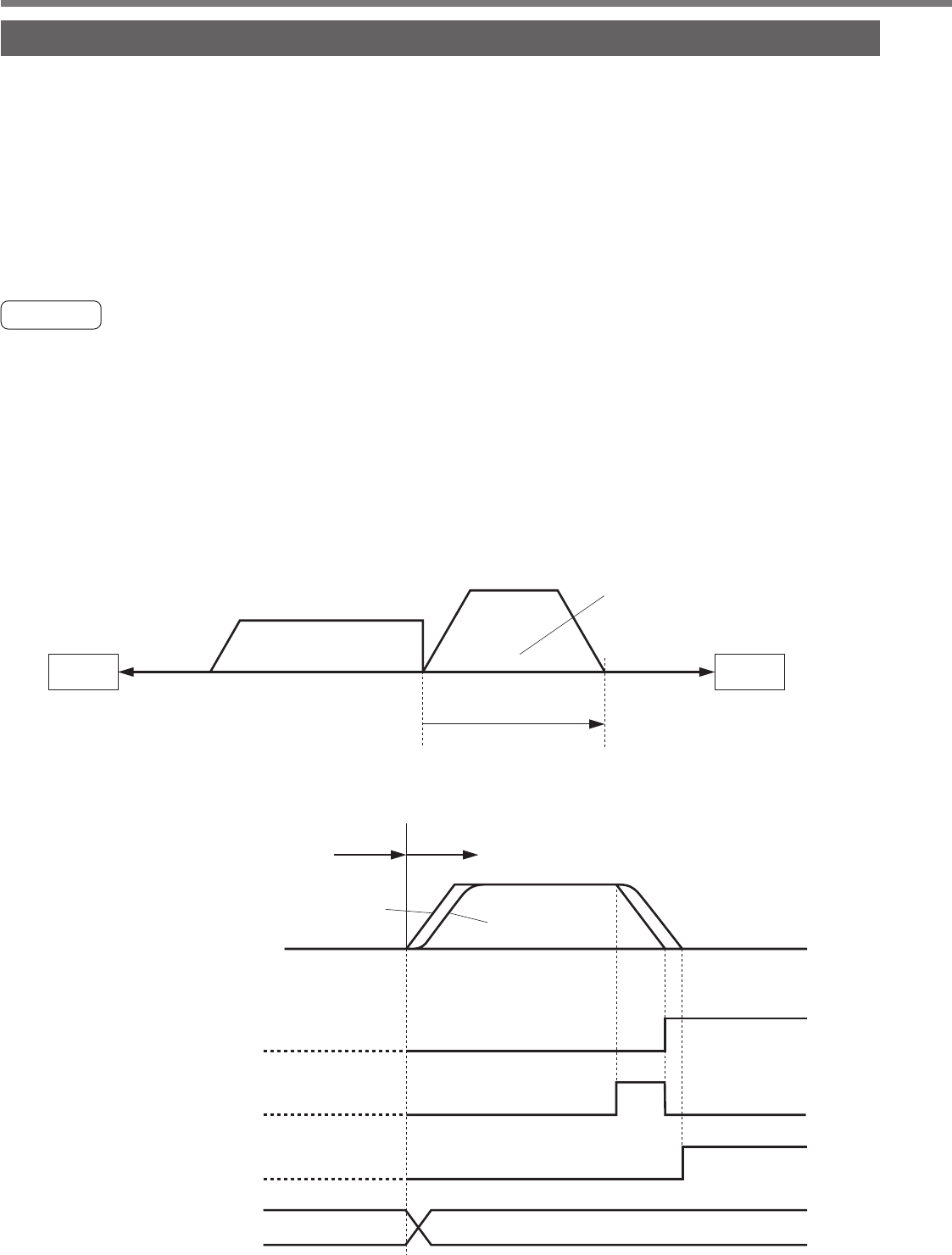
* Example of homing offset
In-operation signal output
(BUSY)
In-deceleration output
(DCLON)
Positioning completion output
(COIN)
Current position output
(P1OUT to P32OUT)
Speed
Maximum point number (homing completed)Point 0
(Homing)
Command
Actual motion
Start of homing offset operationCompletion of homing operation
(Homing offset operation)
Machine homing
= – homing offset
= –5000
Command position = 0
Homing offset travel
= homing offset
= +5000
Transistor OFF
Transistor ON
Transistor OFF
Transistor ON
Transistor ON
Transistor OFF
Transistor OFF
Positive
direction
Negative
direction
• Homing offset is set to “+5000”
• Timing chart