



















144
Outline
Estimates the load inertia of the
machine in real time and sets
up the optimum gain automati-
cally responding to the result.
Also, an adaptive filter can
cope with any load caused by
the resonance.
Applicable Range
Caution
Real-time auto-gain tuning may not be executed properly under the conditions described in the table below.
In these cases, use the normal mode auto-gain tuning (refer to P.148), or execute the manual auto-gain
tuning (refer to P.152).
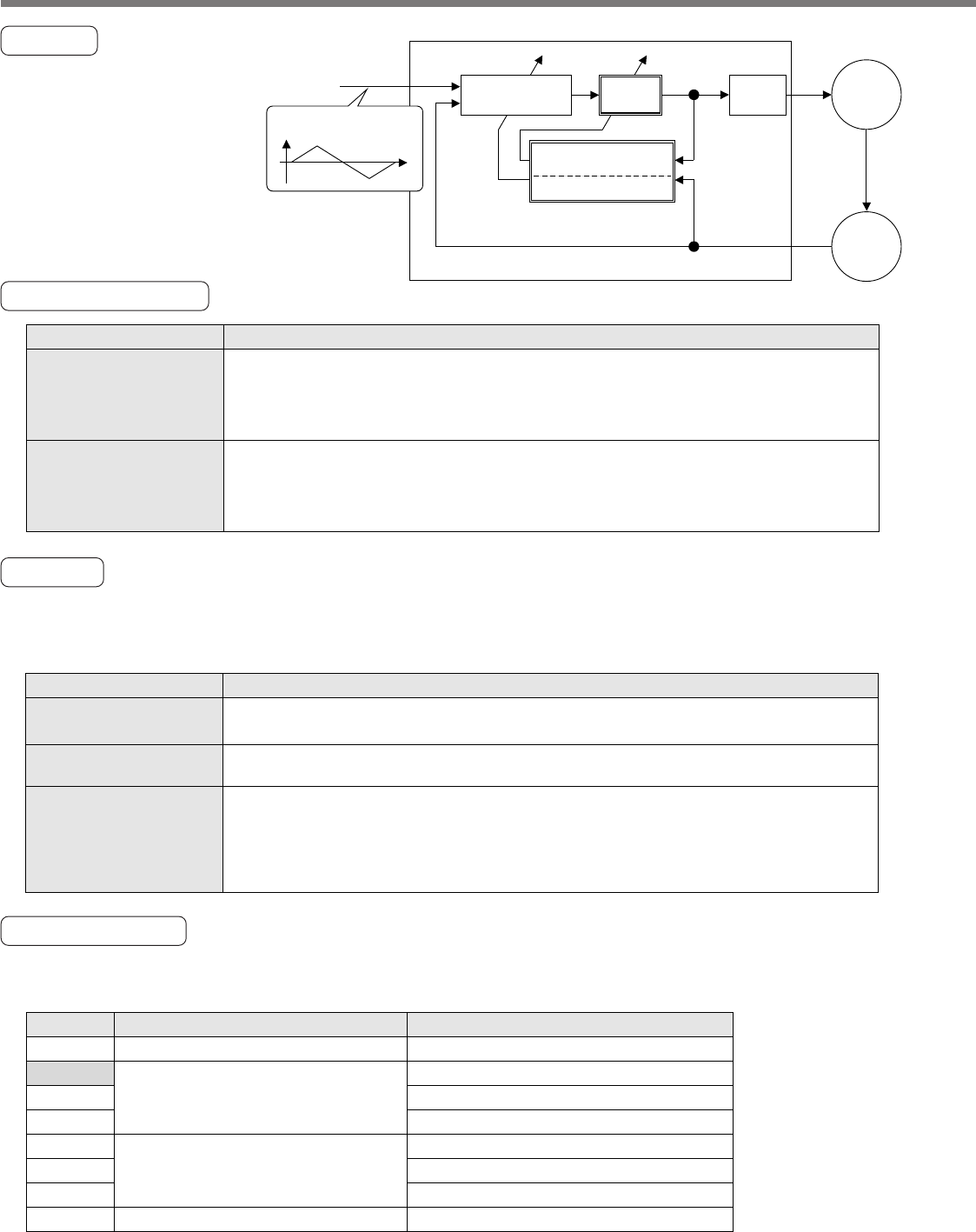
Real-Time Auto-Gain Tuning Mode
Action command under
actual condition
Position/Velocity
command
Position/Velocity
control
Servo driver
Real time
auto-gain tuning
Resonance frequency
estimation
Load inertia estimation
Adaptive
Filter
current
control
Gain
auto-setup
Filter
auto-adjustment
Torque
command
Motor
current
Motor
speed
Motor
Encoder
Conditions which obstruct real-time auto-gain tuning action
•
The load is too small or large compared to the rotor inertia. (less than 3 times or more than 20 times)
• The load inertia changes too quickly (10 [s] or less)
• The machine stiffness is extremely low.
• A chattering such as backlash exists.
• The motor is running continuously at low speed of (100 [r/min] or lower.
• Acceleration/deceleration is slow (2000 [r/min] per 1[s] or low).
•
Acceleration/deceleration torque is smaller than unbalanced weighted/viscous friction torque.
• When the speed condition of 100 [r/min] or more and acceleration/deceleration condition
of 2000 [r/min] per 1 [s] are not maintained for 80 [ms].
Load
Load inertia
Action pattern
Setup value
0
[1]
2
3
4
5
6
7
Real time auto-gain tuning
(not in use)
normal mode
vertical axis mode
no gain switching mode
Varying degree of load inertia in motion
–
no change
slow change
rapid change
no change
slow change
rapid change
no change
When the changing degree of load inertia is large, set up 3 or 6.
When the motor is used for vertical axis, set up 4 to 6.
When vibration occurs during gain switching, set up 7.
Conditions under which the real-time auto-gain tuning is activated
Control mode
Others
•Real time auto-gain tuning is applicable to all control modes.
However, the load inertia estimation will be disabled when a motor trial operation function
is executed and a frequency characteristics measurement function of “PANATERM
®
” is
used.
•The servo turns on.
•Any factors, including Deviation Counter Clear command input inhibition and torque limit,
other than control parameter are set appropriately and the motor can rotate normally
without any problem.
How to Operate
1) Bring the motor to stall (Servo-OFF).
2) Set up SV.Pr21 (Real time auto tuning set up) to 1-7.