



















153
[Adjustment]
Adjustment
10
11
12
13
14
15
16
18
19
1A
1B
1C
1D
1E
Standard
value
27
15
37
0
152
0
0
27
15
37
0
152
1500
2
Title of parameter
1st position loop gain
1st velocity loop gain
1st velocity loop integration time constant
1st speed detection filter
1st torque filter time constant
Velocity feed forward
Feed forward filter time constant
2nd position loop gain
2nd velocity loop gain
2nd velocity loop integration time constant
2nd speed detection filter
2nd torque filter time constant
1st notch frequency
1st notch width selection
20
21
23
2B
2C
2D
2E
30
31
32
33
34
35
4C
4D
Standard
value
100
0
0
0
0
0
0
0
0
0
0
0
0
1
0
Title of parameter
Inertia ratio
Real time auto tuning set up
Adaptive filter mode
1st vibration suppression frequency
1st vibration suppression filter
2nd vibration suppression frequency
2nd vibration suppression filter
2nd gain action set up
1st control switching mode
1st control switching delay time
1st control switching level
1st control switching hysteresis
Position loop gain switching time
Smoothing filter
FIR filter set up
Servo
Parameter
No.
(SV.Pr**)
Servo
Parameter
No.
(SV.Pr**)
Order
1
2
3
4
5
Standard
value
30
50
50
25
300
Title of parameter How to adjust
Servo
Parameter
No.
(SV.Pr**)
SV.Pr11
SV.Pr14
SV.Pr10
SV.Pr12
SV.Pr15
1st velocity loop gain
1st torque filter time
constant
1st position loop gain
1st velocity loop
integration time
constant
Velocity feed forward
Increase the value within the range where no abnormal noise and no vibration
occur. If they occur, lower the value.
When vibration occurs by changing SV.Pr11, change this value.
Setup so as to make SV.Pr11 x SV.Pr14 becomes smaller than 10000. If you
want to suppress vibration at stopping, setup larger value to SV.Pr14 and
smaller value to SV.Pr11. If you experience too large vibration right before
stopping, lower than value of SV.Pr14.
Adjust this observing the positioning time. Larger the setup, faster the
positioning time you can obtain, but too large setup may cause oscillation.
Setup this value within the range where no problem occurs. If you setup
smaller value, you can obtain a shorter positioning time, but too small value
may cause oscillation. If you setup too large value, deviation pulses do not
converge and will be remained.
Increase the value within the range where no abnormal noise occurs.
Too large setup may result in overshoot or chattering of position complete
signal, hence does not shorten the settling time. You can improve by setting up
SV.Pr16 (Feed forward filter time constant) to larger value.
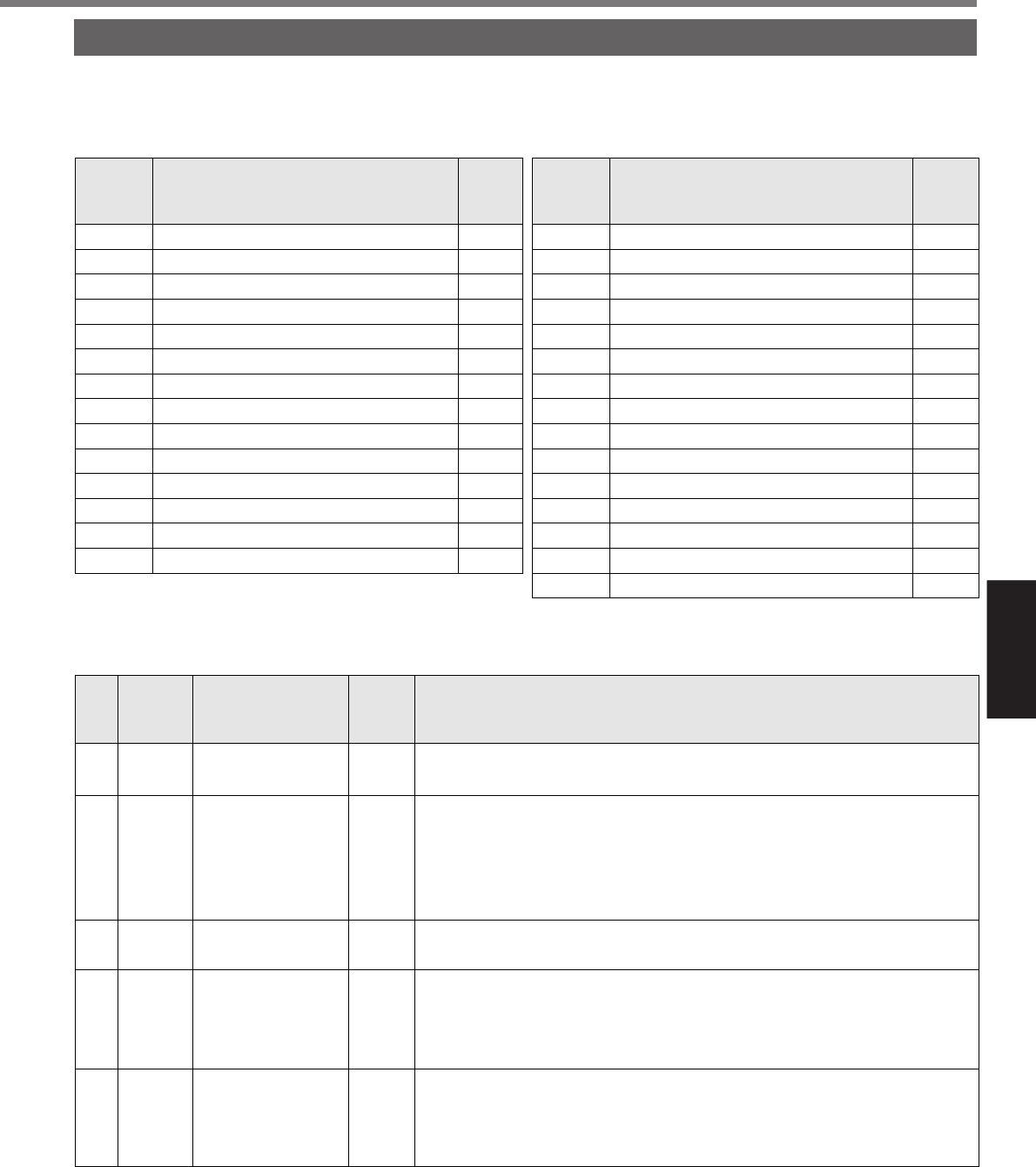
Adjustment in Position Control Mode
Position control of MINAS-A4P series is described in Block diagram of P.224.
Make adjustment in position control per the following procedures.
(1) Set up the following parameters to the values of the table below.
(2) Enter the inertia ratio of SV.Pr20. Measure the ratio or setup the calculated value.
(3) Make adjustment using the standard values below.