



















138
Absolute System
When you make your own cable for 17-bit absolute encoder
When you make your own cable for 17-bit absolute encoder, connect the optional battery for absolute
encoder, DV0P2060 or DV0P2990 as per the wiring diagram below. Connector of the battery for absolute
encoder shall be provided by customer as well.
<Cautions>
Install and fix the battery securely. If the installation and fixing of the battery is not appropriate, it may cause
the wire breakdown or damage of the battery.
Refer to the instruction manual of the battery for handling the battery.
• Installation Place
1) Indoors, where the products are not subjected to rain or direct sun beam.
2) Where the products are not subjected to corrosive atmospheres such as hydrogen sulfide, sulfurous
acid, chlorine, ammonia, chloric gas, sulfuric gas, acid, alkaline and salt and so on, and are free from
splash of inflammable gas, grinding oil, oil mist, iron powder or chips and etc.
3) Well-ventilated and humid and dust-free place.
4) Vibration-free place
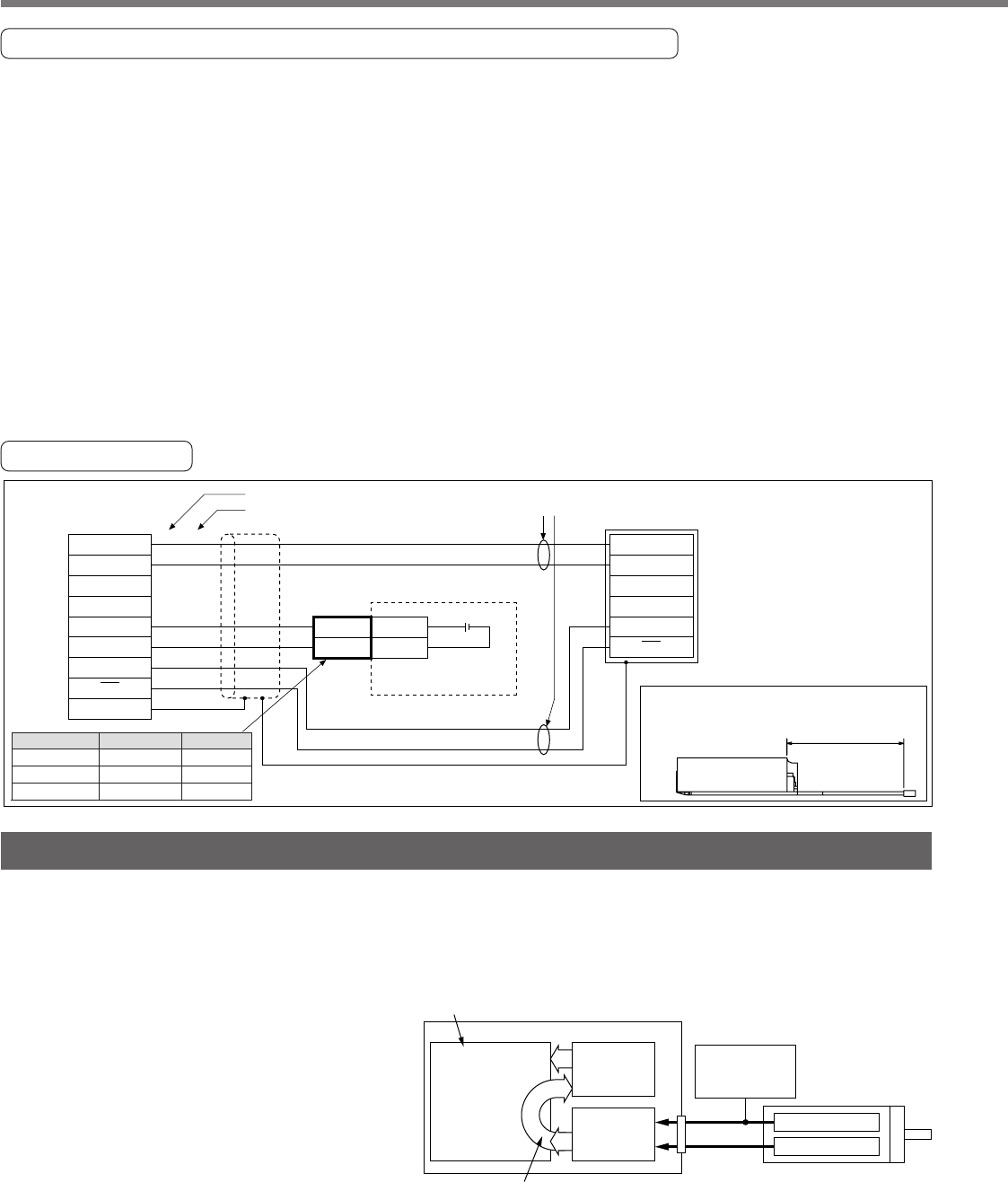
Wiring Diagram
7
Junction connector for
encoder cable
(Optional connector kit)
Pin number when a connector is used
Pin number when a cannon plug is used
Connector, CN X6
(Optional connector kit)
8
1
2
1
2
5
6
1
Battery
Connector, ZHR-2
(by J.S.T.)
Connector for absolute encoder connection
(To be provided by customer)
Battery for absolute encoder (Option)
DV0P2060 or DV0P2990
2
1
2
4
5
3
(H)
(G)
(T)
(S)
(K)
(L)
(J)
E5V
E0V
BAT+
BAT–
BAT+
BAT–
PS
BAT–
BAT+
FG
PS
E5V
E0V
PS
PS
FG (Case)
Twisted
pair
Title
Connector
Connector pin
Clamping Jig
Part No.
ZMR-2
SMM-003T-P0.5
YRS-800
Manufacturer
J.S.T.
J.S.T.
J.S.T.
50
Lead wire
Part No. DV0P2060
Lithium battery by Toshiba Battery Co., Ltd.
ER6V 3.6V 2000mAh
Setup (Initialization) of Absolute Encoder
Execute the setup of absolute encoder in the following cases.
• Initial setup of the machine
• When absolute system down error protection (alarm No. 40) occurs
• When the encoder cable is pulled out
A home position can be set in the two ways
below.
• Normal homing
(Refer to “Homing Operation” on page 114.)
Execute one of the eight types of homing op-
erations and store that position in EEPROM
as the position. Positioning is performed
based on the stored position as the home
position even after the power supply reset.
• Define “0” position of absolute encoder as a home position
Clear an absolute encoder so that a machine home position and the “0” position of absolute encoder can
match with each other. By using a data of the absolute encoder after the power supply reset, positioning is
performed based on the “0” position of absolute encoder as the home position.
The absolute encoder is cleared through a console or “PANATERM
®
”. A multi-turn data only is cleared by
clearing the absolute encoder.
Servo Motor
Encoder
CN X6
EEPROM
(
Home position
)
Battery for
Absolute
Encoder
Servo Driver
*The motor position is stored in EEPROM when homing has been completed.
Single-turn data
Multi-turn data
*For a normal operation, calculate the travel using a value
that the home position is subtracted from the motor position.
Step
Operation
Jog
Operation
Homing
Operation
Motor
Position
(
Absolute
)
position