



















59
[Setting]
Setting
Servo
PrNo.
Setup
range
Title Function/Content
Standard default : < >
08 0 to 12
<0>
Torque monitor
(IM) selection
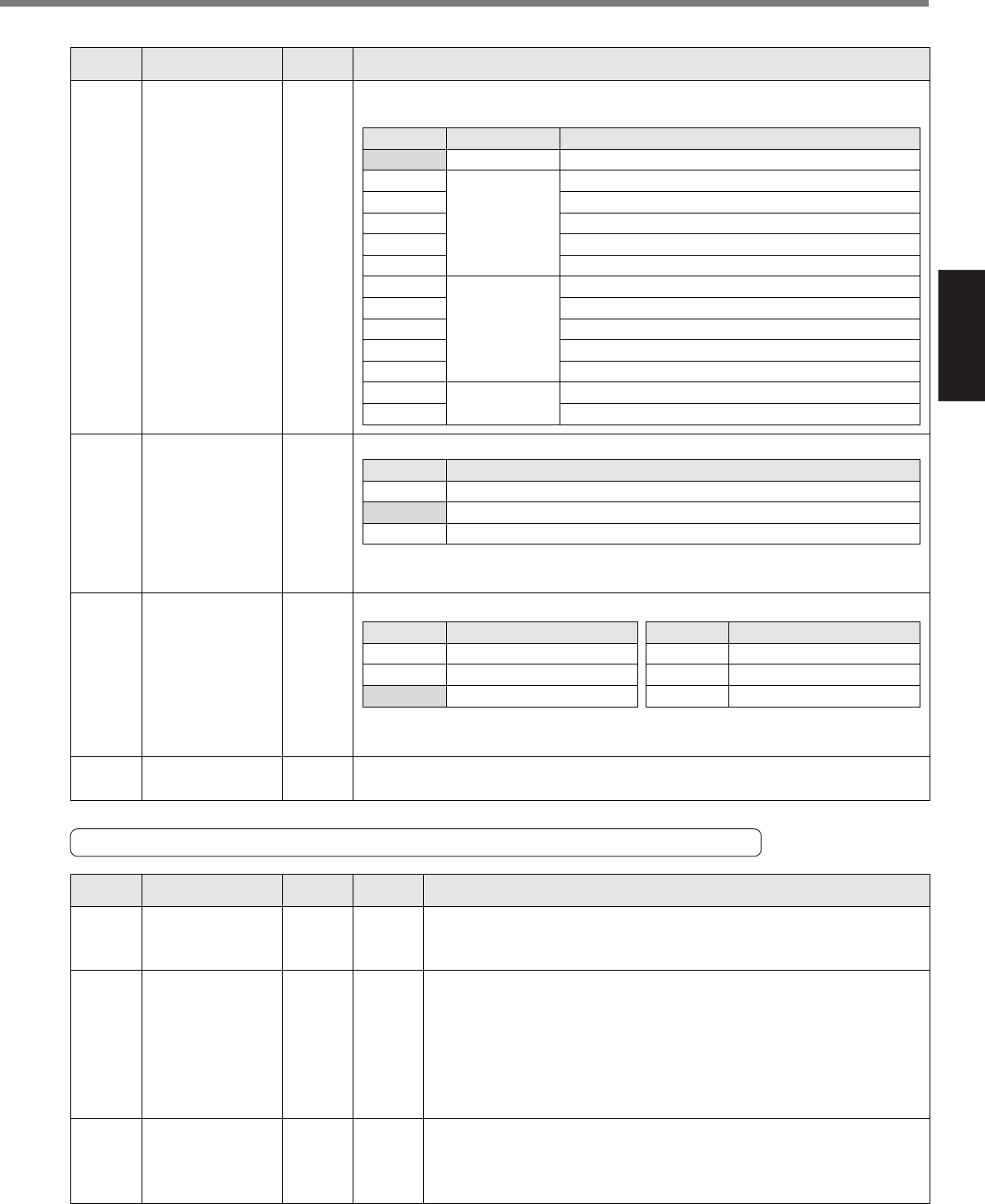
You can set up the content of the analog torque monitor of the signal output (IM : CN X5, Pin-
42), and the relation between the output voltage level and torque or deviation pulse counts.
Setup value
<0>
1
2
3
4
5
6
7
8
9
10
11
12
Signal of IM
Torque command
Position
deviation
Full-closed
deviation
Torque
command
Relation between the output voltage level and torque or deviation pulse counts
3V/rated (100%) torque
3V / 31Pulse
3V / 125Pulse
3V / 500Pulse
3V / 2000Pulse
3V / 8000Pulse
3V / 31Pulse
3V / 125Pulse
3V / 500Pulse
3V / 2000Pulse
3V / 8000Pulse
3V / 200% torque
3V / 400% torque
0B
*
0 to 2
<1>
Absolute encoder
set up
You can set up the using method of 17-bit absolute encoder.
<Caution>
This parameter will be invalidated when 5-wire, 2500P/r incremental encoder is used.
Setup value
0
<1>
2
Content
Use as an absolute encoder.
Use as an incremental encoder.
Use as an absolute encoder, but ignore the multi-turn counter over.
0C
*
0 to 5
<2>
Baud rate of
RS232
You can set up the communication speed of RS232.
Setup value
0
1
<2>
Baud rate
2400bps
4800bps
9600bps
Setup value
3
4
5
Baud rate
19200bps
38400bps
57600bps
• Error of baud rate is ±0.5%.
0F –
(display only)
Node address Shows the axis number set by a rotary switch at the front panel of the driver. The
axis number cannot be changed.
<Caution>
If the console is used specify the set value 2 (9600 bps).
Parameters for Adjustment of Time Constants of Gains and Filters
Standard default : < >
Servo
PrNo.
Setup
range
UnitTitle Function/Content
10 0 to 3000
A to C-frame:<63>*
D to F-frame:<32>*
1/s1st position loop
gain
You can determine the response of the positional control system.
Higher the gain of position loop you set, faster the positioning time you
can obtain. Note that too high setup may cause oscillation.
11 1 to 3500
A to C-frame:<35>*
D to F-frame:<18>*
Hz1st velocity loop
gain
You can determine the response of the velocity loop.
In order to increase the response of overall servo system by setting high
position loop gain, you need higher setup of this velocity loop gain as well.
However, too high setup may cause oscillation.
<Caution>
When the inertia ratio of SV.Pr20 is set correctly, the setup unit of
SV.Pr11 becomes (Hz).
12 1 to 1000
A to C-frame:<16>*
D to F-frame:<31>*
ms1st velocity loop
integration time
constant
You can set up the integration time constant of velocity loop.
Smaller the setup, faster you can dog-in deviation at stall to 0.
The integration will be maintained by setting to "999".
The integration effect will be lost by setting to "1000".