



















AX500 Motor Controller User’s Manual 29
Single Channel Operation
After connecting the motors, apply a minimal amount of power using the Roborun PC util-
ity with the controller configured in Open Loop speed mode. Verify that the motor spins in
the desired direction. Immediately stop and swap the motor wires if not.
In Closed Loop Speed or Position mode, beware that the motor polarity must match this of
the feedback. If it does not, the motors will runaway with no possibility to stop other than
switching Off the power. The polarity of the Motor or off the feedback device may need to
be changed.
Important Warning
Make sure that your motors have their wires isolated from the motor casing. Some
motors, particularly automotive parts, use only one wire, with the other connected
to the motor’s frame.
If you are using this type of motor, make sure that it is mounted on isolators and that
its casing will not cause a short circuit with other motors and circuits which may
also be inadvertently connected to the same metal chassis.
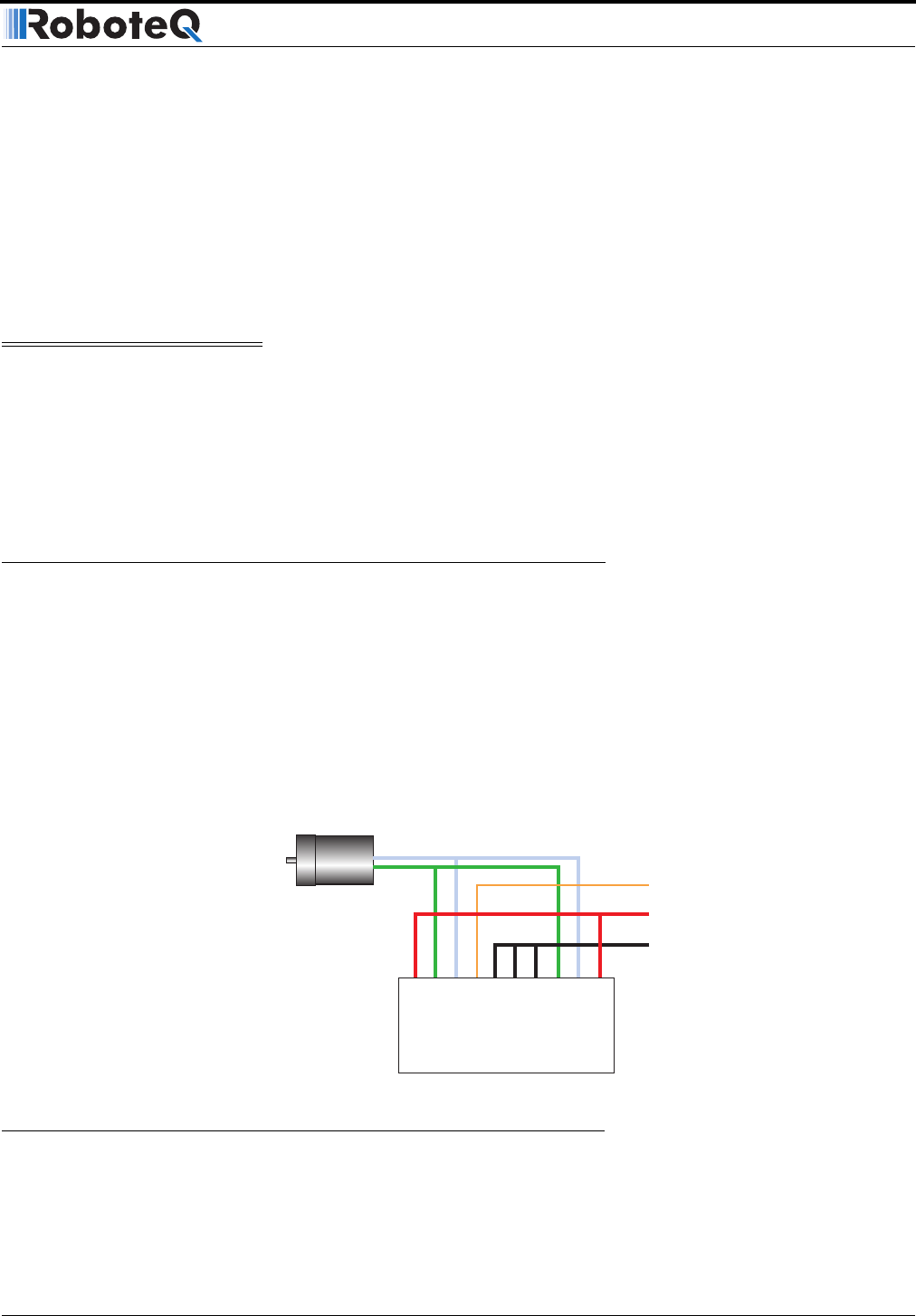
Single Channel Operation
The AX500’s two channel outputs can be paralleled as shown in the figure below so that
they can drive a single load with twice the power. To perform in this manner, the control-
ler’s Power Transistor that are switching in each channel must be perfectly synchronized.
Without this synchronization, the current will flow from one channel to the other and cause
the destruction of the controller.
The controller may be ordered with the -SC (Single Channel) suffix. This version incorpo-
rates a hardware setting inside the controller which ensures that both channels switch in a
synchronized manner and respond to commands sent to channel 1.
-
+
Controller
GND
12V to 40V
Pwr Ctrl
VMot
VMot
M1-
M1+
VCon
GND
GND
GND
M2+
M2-
FIGURE 11. Wiring for Single Channel Operation
Warning:
Use this wiring only with
-SC versions (Single
Channel) of the controller