



















AX500 Motor Controller User’s Manual 3
Revision History
The information contained in this manual is believed to be accurate and reliable. However,
it may contain errors that were not noticed at time of publication. User’s are expected to
perform their own product validation and not rely solely on data contained in this manual.
Revision History
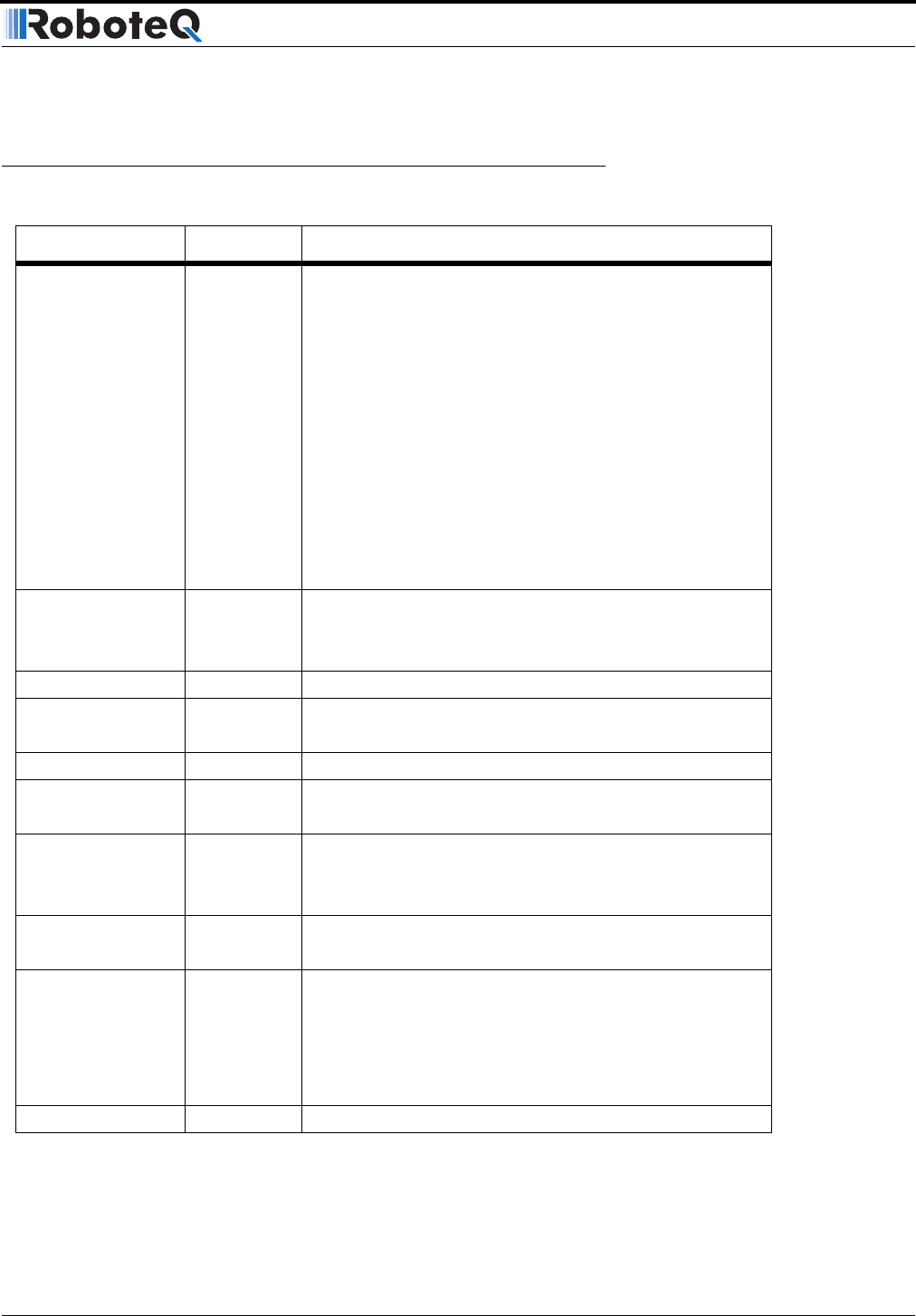
Date Version Changes
June 1, 2007 1.9b Added Output C active when Motors On
Fixed Encoder Limit Switches
Protection in case of Encoder failure in Closed Loop Speed
Added Short Circuit Protection (with supporting hardware)
Added Analog 3 and 4 Inputs (with supporting hardware)
Added Operating Mode Change on-the-fly
Changeable PWM frequency
Selectable polarity for Dead Man Switch
Modified Flashing Pattern
Separate PID Gains for Ch1 and C2, changeable on-the-fly
Miscellaneous additions and correction
Added Amps Calibration option
January 10, 2007 1.9 Changed Amps Limit Algorithm
Miscellaneous additions and correction
Console Mode in Roborun
March 7, 2005 1.7b Updated Encoder section.
February 1, 2005 1.7 Added Position mode support with Optical Encoder
Miscellaneous additions and corrections
April 17, 2004 1.6 Added Optical Encoder support
March 15, 2004 1.5 Added finer Amps limit settings
Enhanced Roborun utility
August 25, 2003 1.3 Added Closed Loop Speed mode
Added Data Logging support
Removed RC monitoring
August 15, 2003 1.2 Modified to cover AX500 controller design
Changed Power Connection section
April 15, 2003 1.1 Added analog mode section
Added position mode section
Added RCRC monitoring feature
Updated Roborun utility section
Modified RS232 watchdog
March 15, 2003 1.0 Initial Release