



















23
CHAPTER 1 OVERVIEW
1
1.3 About the PID Operation
1.3.1 Operation method and formula
1.3 About the PID Operation
The Q64TCN can perform PID control in process-value incomplete derivation.
1.3.1 Operation method and formula
The PID control in process-value incomplete derivation is an operation method which puts a primary delay filter on
input from a derivative action and eliminate high-frequency noise component in order to perform a PID operation on
the deviation (E).
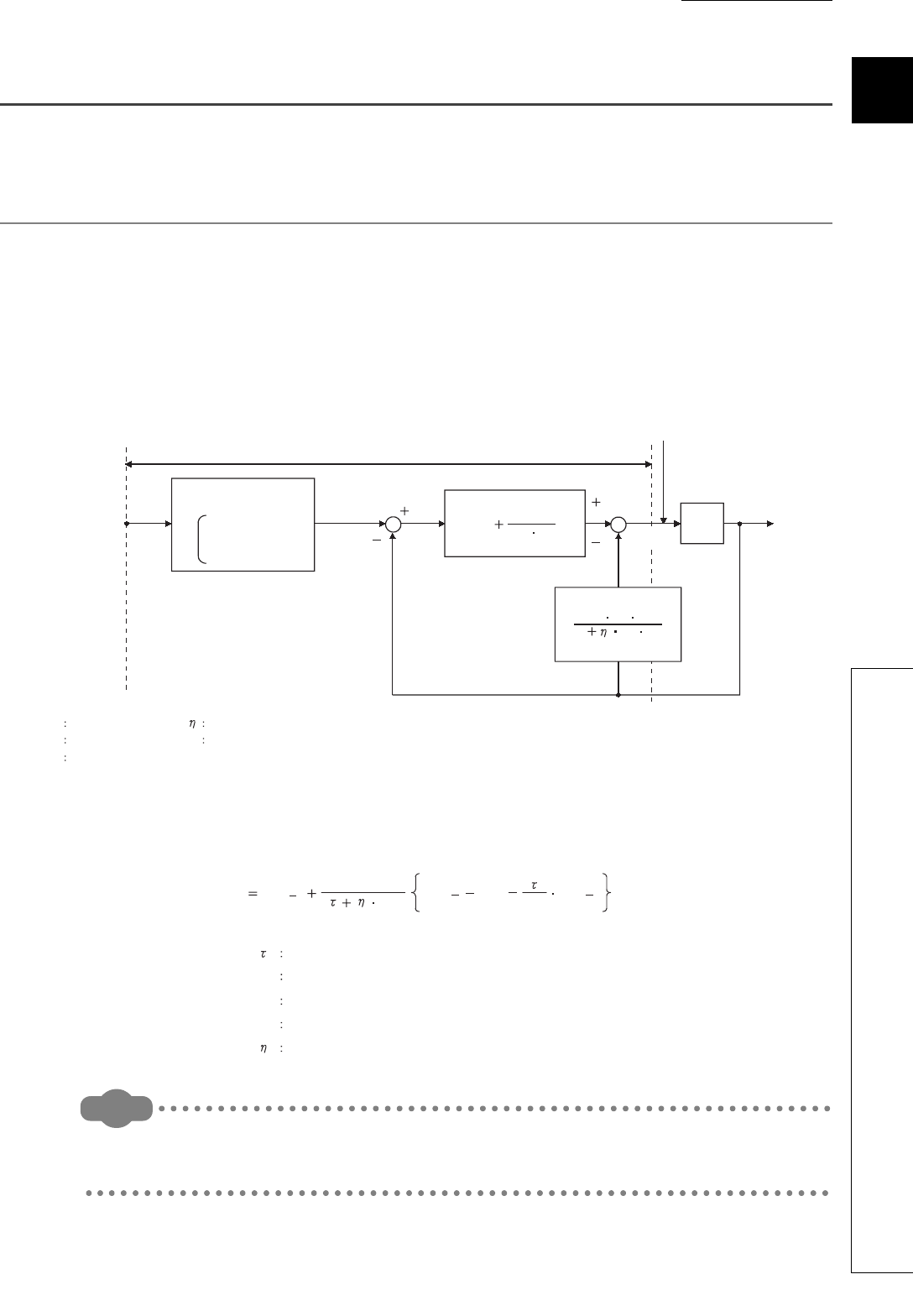
(1) Algorithm of PID control in process-value incomplete derivation
The algorithm of PID control in process-value incomplete derivation is shown below.
(2) Formula
The formula used for the Q64TCN is shown below.
Remark
The PID control in process-value derivation is an operation method which uses the process value (PV) for the derivation
section in order to perform a PID operation. Not using deviation for the derivation section, drastic output change due to a
derivative action is reduced when deviation varies along with the setting value change.
Q64TCN
Control object
Slow
Normal
Fast
1
Disturbance D
G(s)
K
P TD s
1
TD s
Temperature
process value (PV)
Laplace transform conversion
DerivativeProportional gain
Integral time
Derivative time
Set value (SV)
K
P (1 )
Control response
parameters
TI s
KP
TI
TD
s
Manipulated
value (MV)
Sampling cycle
Incomplete derivative output
Temperature process value (PV)
Derivative time
Derivative
MV
n MVn 1
TD
(PV
n 1 PVn)
T
D
MVn 1
MV
PV
T
D
TD