



















46
RFB limiter function
When the deviation (E) continues for a long time, the PID operation
result (manipulated value (MV)) by the integral action can be
prevented from exceeding the effective range of the manipulated
value (MV).
Page 208,
Section 4.13
Sensor correction
function
If a difference between a temperature process value (PV) and an
actual temperature occurs due to the measurement status, the
error can be corrected. Select a correction method from the
following two types.
• Normal sensor correction (one-point correction) function: The
percentage of the full scale of the set input range can be
corrected as an error corrected value.
• Sensor two-point correction function: An error is corrected by
setting any two points (corrected offset value and corrected gain
value).
Page 209,
Section 4.14
Auto-setting at input
range change
When the input range is changed, the related buffer memory data
is changed automatically so that errors outside the setting range
does not occur.
Page 220,
Section 4.15
Input/output (with another
analog module) function
Data can be input/output using another analog module (A/D
conversion module or D/A conversion module) on the system.
Page 221,
Section 4.16
ON delay output function
Setting with considering delay time (response/scan time delay) of
actual transistor output is possible.
Page 222,
Section 4.17
Self-tuning function
The Q64TCN monitors the control status constantly. If the control
system oscillates due to a status soon after the control starts, a
change of the set value (SV), and property fluctuation of a
controlled object, PID constants are changed automatically.
×
Page 223,
Section 4.18
Peak current suppression
function
Changing automatically the upper limit output limiter value of each
channel and dividing the timing of transistor output can suppress
the peak current.
×
Page 233,
Section 4.19
Simultaneous
temperature rise function
This function allows several loops to reach the set value (SV) at the
same time.
×
Page 238,
Section 4.20
Forward/reverse action
selection function
Whether to perform PID operations in the forward action or reverse
action can be selected.
×
Page 252,
Section 4.21
Loop disconnection
detection function
Errors in the control system (control loop) can be detected. ×
Page 253,
Section 4.22
During AT loop
disconnection detection
function
A loop disconnection can be detected during auto tuning. ×
Page 255,
Section 4.23
Proportional band setting
function
The proportional band (P) can be individually set for heating or
cooling.
×
Page 257,
Section 4.24
Cooling method setting
function
When the auto tuning is executed, an auto tuning formula is
automatically selected according to the selected cooling method
and the operation starts.
×
Page 258,
Section 4.25
Overlap/dead band
function
By changing the temperature where the cooling transistor output is
started, whether control stability is prioritized or energy saving is
prioritized can be selected.
×
Page 259,
Section 4.26
Temperature conversion
function (using unused
chan
nels)
In heating-cooling control (normal mode) and mix control (normal
mode), only temperature measurement is allowed by using unused
temperature input terminals.
×
Page 262,
Section 4.27
Heater disconnection
detection function
The current which flows in the heater main circuit can be measured
and disconnections can be detected.
Page 265,
Section 4.28
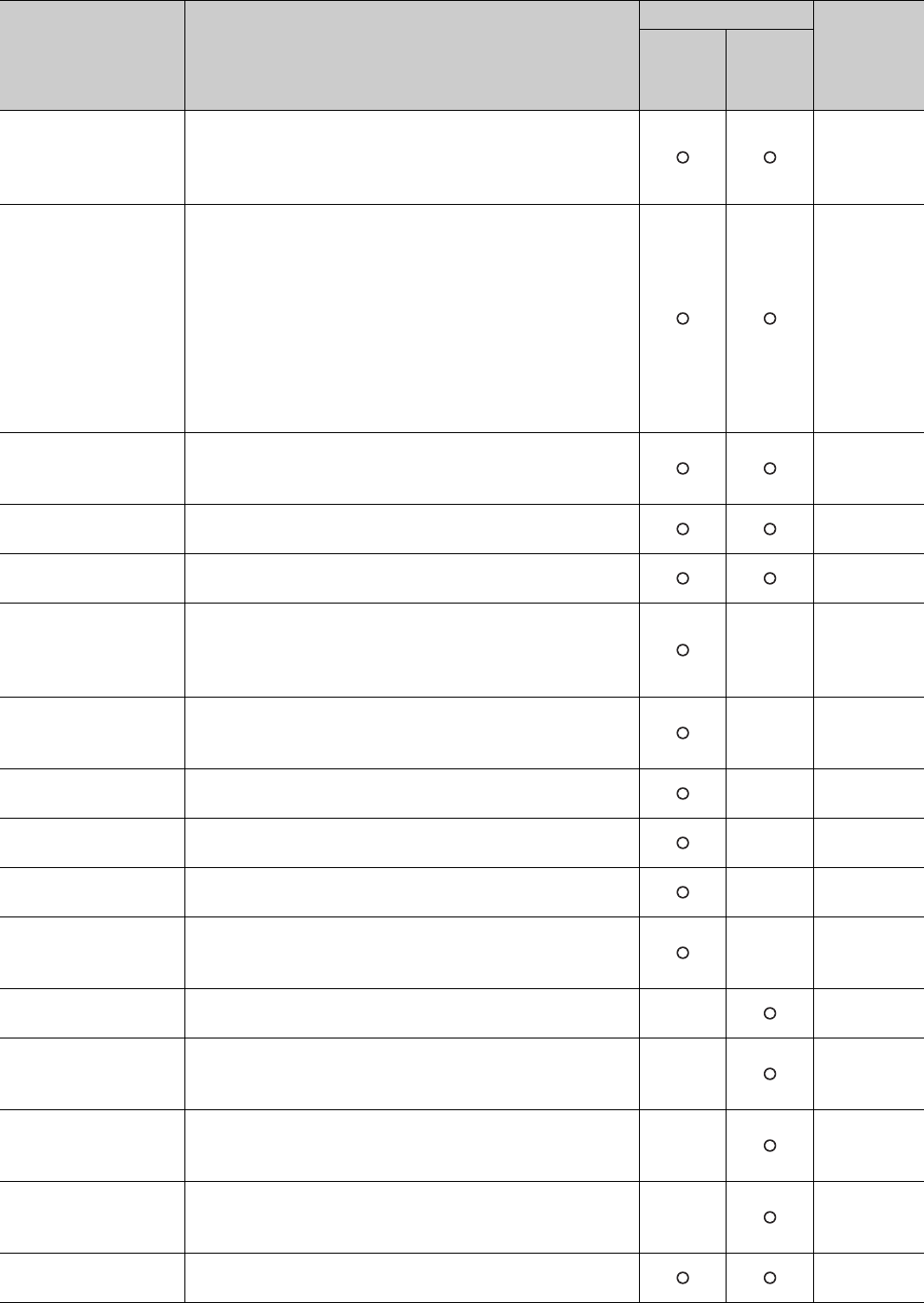
Item Description
Enable or disable
Reference
Standard
control
Heating-
cooling
control