



















86
4.3 Types and Functions of System Input Signals
(Compatible Mode)
The table below lists the system input signals to be used in compatible mode.
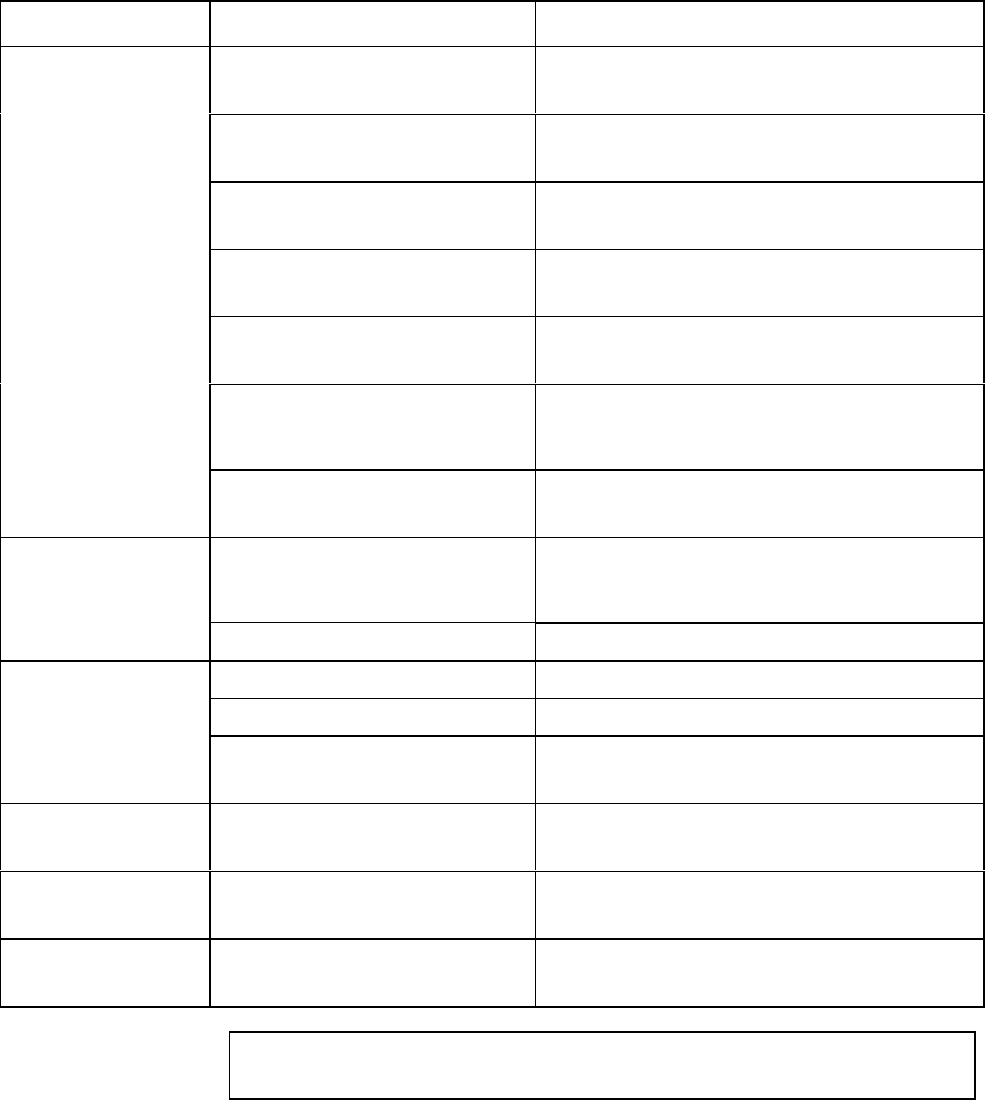
Types and Functions of System Input Signals to be Used in Compatible Mode
Application Signal name Function
Enable Auto Enables switching to Auto mode.
Motor power ON
+ operation preparation start
Turns ON the power to the motor.
CAL execution
+ operation preparation start
Executes calibration.
SP100
+ operation preparation start
Sets the speed to 100%.
Switch Ext Mode
+ operation preparation start
Switches the mode to external mode.
Program reset
+ operation preparation start
Initializes all programs on halt. Starting a
program after initialization will execute the
program from the beginning.
Start-up
Program No. select
+ program start
Executes a specified program.
Program reset
+ program No. select
+ program start
Cancels the current program and starts
executing a specified program from the
beginning.
Program
execution
Robot stop Stops the robot by opening signals.
Robot stop Stops the robot by canceling signals.
Step stop Step-stops all programs by opening signals.
Stop
Instantaneous stop
Instantaneously stops all programs by
opening signals.
Error clear
Clear robot failure
+ operation preparation start
Clears an error.
Program interrupt Interrupt skip
Interrupts the execution of the current step
and starts the next step.
Continue start
Continue start
+ program start
Executes continue start.
Caution: Two or more signal names listed in the signal name field
indicate that they should be used in combination.