



















12
1.4.2 Typical Robot System Configurations
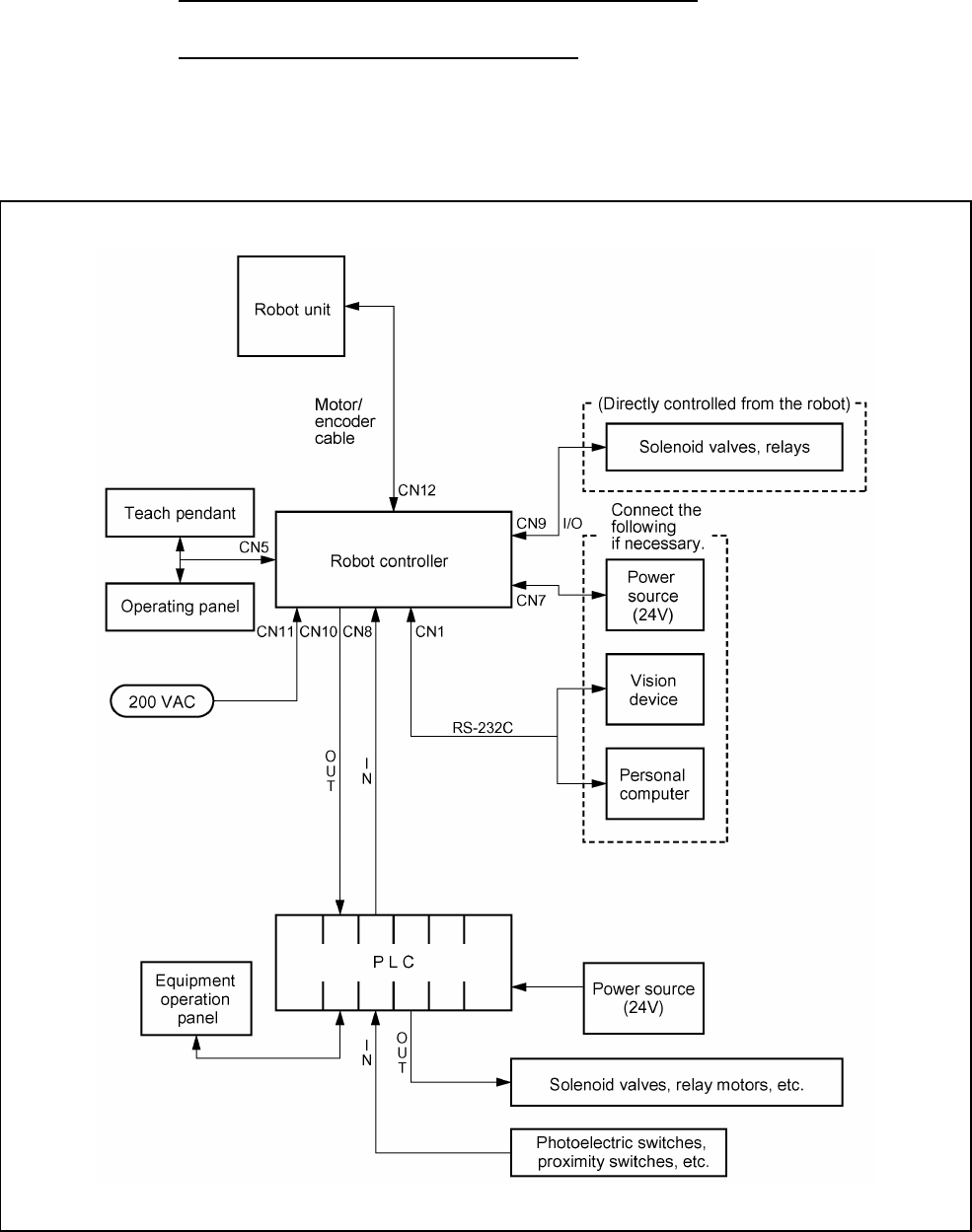
The block diagrams below show typical robot system configurations.
To connect encoders via a time-division multiplexed bus: Connect the robot controller
(CN12) to the robot unit with a motor/encoder cable (see below).
To connect encoders via parallel interface: Connect the robot controller (CN12 and
CN13) to the robot unit with a motor cable and encoder cable, respectively.
n
nn
n Robot system configuration with encoders connected via a multiplexed bus
(VM-D, VS-E, HS-E, and HM-E)
Robot System Configuration